

Zipeng Fu
@zipengfu
Followers
11,772
Following
1,204
Media
36
Statuses
272
Stanford AI & Robotics PhD @StanfordAILab | Creator of Mobile ALOHA, Robot Parkour | Past: Google DeepMind, CMU, UCLA
Palo Alto, CA
Joined February 2014
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
Renzo
• 149514 Tweets
#WWERaw
• 82544 Tweets
#GodMorningTuesday
• 37096 Tweets
Scarlett Johansson
• 33379 Tweets
Oilers
• 32756 Tweets
Fani Willis
• 31365 Tweets
定額減税
• 30436 Tweets
Kingdom Hearts
• 28122 Tweets
राजीव गांधी
• 26553 Tweets
梅雨入り
• 25308 Tweets
Birds Nurturing
• 24042 Tweets
給与明細
• 24010 Tweets
Gunther
• 22163 Tweets
#Canucks
• 20882 Tweets
Vancouver
• 20788 Tweets
#ファンパレハーフアニバーサリー
• 18934 Tweets
Edmonton
• 17581 Tweets
ドジャース
• 17426 Tweets
金額明記
• 17231 Tweets
Amber Rose
• 15464 Tweets
ショートアニメ
• 14937 Tweets
キングダムハーツ
• 14089 Tweets
Lyra
• 12452 Tweets
国民実感
• 10659 Tweets



















Pinned Tweet

Mobile ALOHA's hardware is very capable. We brought it home yesterday and tried more tasks! It can:
- do laundry👔👖
- self-charge⚡️
- use a vacuum
- water plants🌳
- load and unload a dishwasher
- use a coffee machine☕️
- obtain drinks from the fridge and open a beer🍺
- open
407
2K
7K
Introduce 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Learning!
With 50 demos, our robot can autonomously complete complex mobile manipulation tasks:
- cook and serve shrimp🦐
- call and take elevator🛗
- store a 3Ibs pot to a two-door cabinet
Open-sourced!
Co-led
@tonyzzhao
,
@chelseabfinn
188
891
4K
Introduce our
#CoRL2023
(Oral) project:
"Robot Parkour Learning"
Using vision, our robots can climb over high obstacles, leap over large gaps, crawl beneath low barriers, squeeze through thin slits, and run. All done by one neural network running onboard.
And it's open-source!
24
229
1K
Our robot can consistently handle these tasks, succeeding:
- 9 times in a row for Wipe Wine
- 5 times for Call Elevator
- robust against distractors for Use Cabinet
- extrapolate to chairs unseen during training
9
45
387
Mobile ALOHA 🏄 is coming soon!
Special thanks to
@tonyzzhao
for throwing random objects into the scene, and
@chelseabfinn
for the heavy pot (> 3 lbs) !
Stay tuned!
9
58
380
We open-source all the software and data of Mobile ALOHA!
Project Website 🛜:
Code for Imitation Learning 🖥️:
Data 📊:
2
35
303
The robot is teleoperated in the video (for now!)
Checkout
@tonyzzhao
's thread on how we design the low-cost open-source hardware and teleoperation system!

Introducing 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Hardware!
A low-cost, open-source, mobile manipulator.
One of the most high-effort projects in my past 5yrs! Not possible without co-lead
@zipengfu
and
@chelseabfinn
.
At the end, what's better than cooking yourself a meal with the 🤖🧑🍳
236
1K
5K
15
37
257
Super excited to announce that I will join
@StanfordAILab
for my PhD as a Stanford Graduate Fellow to keep exploring in Robotics & AI. Deeply grateful to my advisor
@pathak2206
, mentors Jitendra Malik &
@ashishkr9311
for their huge support and guidance! Will miss
@CarnegieMellon
16
7
236
Good time spending days and nights with
@tonyzzhao
at the brand new Stanford Robotics Center and
@chelseabfinn
's lab.
Much funnier when sound on!
Robots are not ready to take over the world yet!
@zipengfu
and I just compiled a video of the dumbest mistakes 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 made in the autonomous mode 🤣
We are also planning to organize some live demos after taking a break. Stay tuned!
66
222
1K
19
30
222
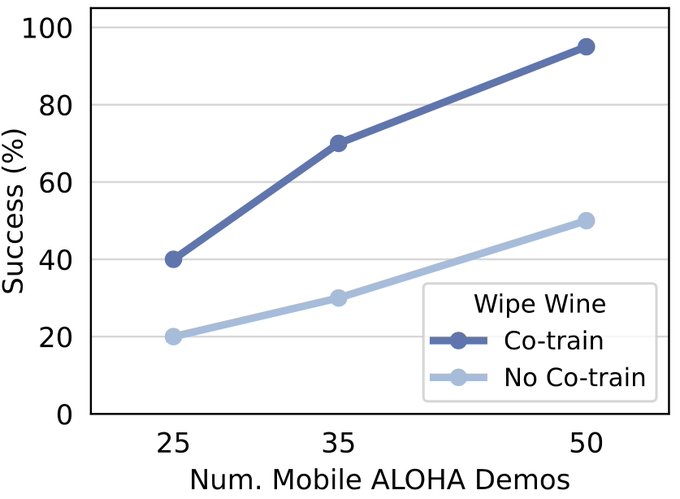
How do we achieve this with only 50 demos?
The key is to co-train imitation learning algorithms with static ALOHA data. We found this to consistently improve performance, especially for tasks that require precise manipulation.
2
16
200
Want to dive deeper into the hardware of Mobile ALOHA?
Check out 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Hardware from co-lead
@tonyzzhao
!
Introducing 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Hardware!
A low-cost, open-source, mobile manipulator.
One of the most high-effort projects in my past 5yrs! Not possible without co-lead
@zipengfu
and
@chelseabfinn
.
At the end, what's better than cooking yourself a meal with the 🤖🧑🍳
236
1K
5K
10
18
178
Our video is clearly inspired by the iconic PR1 video, showing "the hardware is capable, what we need is better AI to make the robot smart enough to do things on its own" (quote
@pabbeel
)
We present our first steps in bridging gaps btw teleop & autonomy:
Introduce 𝐌𝐨𝐛𝐢𝐥𝐞 𝐀𝐋𝐎𝐇𝐀🏄 -- Learning!
With 50 demos, our robot can autonomously complete complex mobile manipulation tasks:
- cook and serve shrimp🦐
- call and take elevator🛗
- store a 3Ibs pot to a two-door cabinet
Open-sourced!
Co-led
@tonyzzhao
,
@chelseabfinn
188
891
4K
11
24
166
Very glad to host
@UnitreeRobotics
at
@StanfordAILab
today!
RL controllers are now the default choice of the industry.
2
10
144
@UnitreeRobotics
B2 has the best quadruped controller that I've ever seen, combining the robustness of RL controllers and naturalness of model-based controllers in a perfect way. Just incredible...
1
20
122
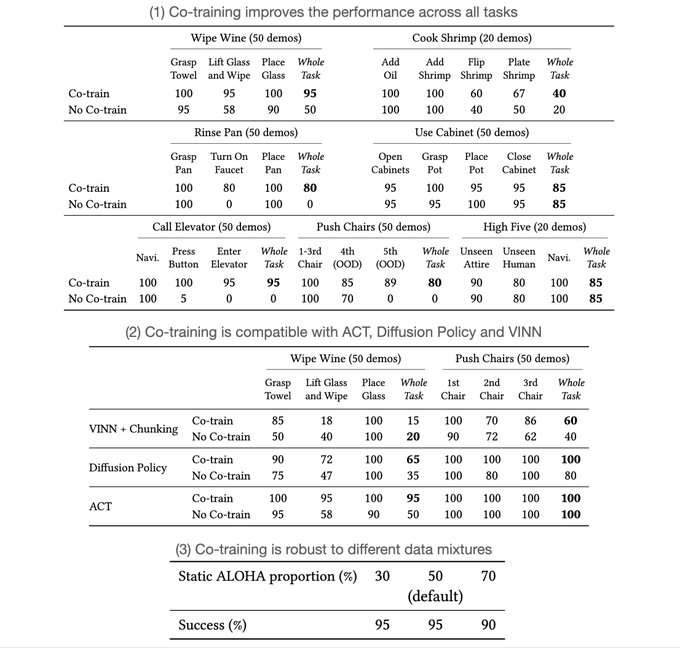
Co-training (1) improves the performance across all tasks, (2) is compatible with ACT, Diffusion Policy and VINN, (3) is robust to different data mixtures.
1
15
111
Trained fully in sim, our parkour policy has emergent re-trying behaviors, allowing the robot to attempt overcoming an obstacle multiple times if it initially fails. The robot learns to push against the obstacle, ensuring adequate run-up space for subsequent attempts.
3
12
88


Results from the Japanese robotics silo just keep impressing me again and again ...

0
5
47
Check out our
#CoRL2022
Oral Talk and live demo of "Deep Whole-Body Control" given by
@pathak2206
(w/
@xuxin_cheng
). Super excited it made into the list of 3 finalists for the Best Systems Paper Award!
Project website:
Oral Talk:

2
4
45
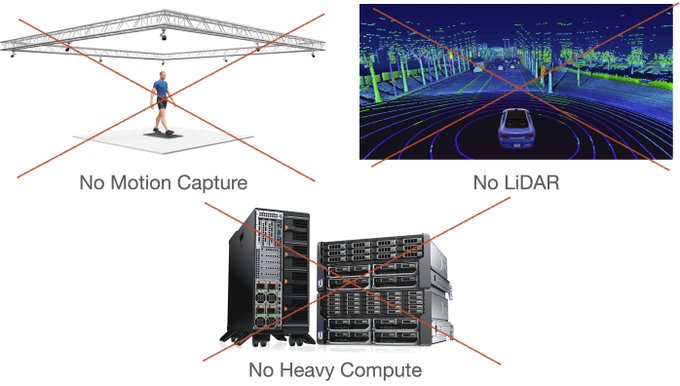
Our parkour policy can be deployed to low-cost robots (e.g. A1, Go1) using only onboard compute (Nvidia Jetson), one onboard depth camera (Intel Realsense) and onboard power. No motion capture, LiDAR, multiple depth cams, heavy compute are used.
1
3
44
This project is led by
@ziwenzhuang_leo
and me.
Advised by
@chelseabfinn
and
@zhaohang0124
.(Please consider follow
@ziwenzhuang_leo
for more cool robot demos in future!)
Project website:
Code:
w/
@wang_jianren
, Chris and Sören
7
5
40
How do we train our parkour policy?
Stage 1: RL pre-training with soft dynamics constraints. We allow robots to penetrate obstacles using an auto curriculum that encourages robots to gradually learn to overcome obstacles while minimizing penetrations.
1
1
33
biped locomotion is solved by
@ZhongyuLi4
🙂

Interested in making your bipedal robots to be athletes? We summarized our RL work to create robust & adaptive controllers for general bipedal skills. 400m-dash, running over terrains/against perturbations, targeted jumping, compliant walking, not a problem for bipeds now.🧵👇
15
90
441
1
3
31
Stage 3: Distillation. After each individual parkour skill is learned, we use DAgger to distill them into a single vision-based parkour policy (parametrized by a RNN) that has memory and can be deployed to a legged robot using only onboard perception and compute.

1
2
29
at this moment, the robot dog knows it's actually a humanoid in disguise
Evolution!!


🔥Exciting news 🤖
Our latest research by
@HoellerDavid
,
@rdn_nikita
,
@2nisi
in
@SciRobotics
unlocks new achievements: Unprecedented agility in quadrupedal robots, mastering locomotion, navigation, and perception through deep reinforcement learning!
@NVIDIARobotics
22
124
608
3
0
28
Stage 2: RL fine-tuning with hard dynamics constraints. We enforce all dynamics constraints and fine-tune the behaviors learned in the pre-training stage with realistic dynamics.
1
1
26
@ziwenzhuang_leo
@chelseabfinn
@zhaohang0124
@wang_jianren
@StanfordAILab
CoRL 2023 Best Systems Paper Finalist!

CoRL 2023 completed! Demo succeeded! Finalist achieved! 🎊🎉🍾
1
13
96
1
2
26
we haven't shown all of our results. coming soon!

6
0
24
who doesn't want a bag of trail mix?
congrats
@lucy_x_shi

Introducing Yell At Your Robot (YAY Robot!) 🗣️- a fun collaboration b/w
@Stanford
and
@UCBerkeley
🤖
We enable robots to improve on-the-fly from language corrections: robots rapidly adapt in real-time and continuously improve from human verbal feedback.
YAY Robot enables
17
79
461
1
2
18
Imagine combine this pipeline with Vision Pros. Maybe Apple has a huge edge in in-the-wild robot data collection?
Congrats
@chenwang_j
and the team!

Can we use wearable devices to collect robot data without actual robots?
Yes! With a pair of gloves🧤!
Introducing DexCap, a portable hand motion capture system that collects 3D data (point cloud + finger motion) for training robots with dexterous hands
Everything open-sourced
21
131
624
1
2
16
Huge thanks to
@anag004
@shikharbahl
@ashishkr9311
helping live demos. Video recording by
@xuxin_cheng
. Photo credit to
@breadli428
1
2
16
Join us at
#CVPR2022
for robot demos

Attending first in-person conf since the pandemic at
#CVPR2022
. We gave live demos of our robots during my talk at Open-World Vision workshop.
The convention center mostly had dull flat ground, so we had to find scraps and be creative with them to build "difficult" terrains! 😅
2
17
215
0
0
15
Excited to share our work on agile locomotion! Inspired by biomechanics, elegant gaits emerge from minimizing energy consumption without any motion or imitation priors.
Excited to report our progress on agile locomotion!
In CoRL'21 paper, we simplify RMA rewards with just an energy term motivated by biomechanics. Optimal gaits *emerge* across speeds w/o *any* priors like high-speed galloping with emergent flight phase!!
4
35
246
0
0
12
@scott_e_reed
@tonyzzhao
@chelseabfinn
Thanks Scott! The compute and NN models maybe were not ready 10 years ago. PR1 has also shown amazing teleop results a way back.
1
0
6
1
1
7
We released our checkpoints for Go1.
Now you can download and try the policy on your Go1!
Stay tuned on our in-person CoRL demo🥳
0
3
18
2
2
6
@Scobleizer
@nfkmobile
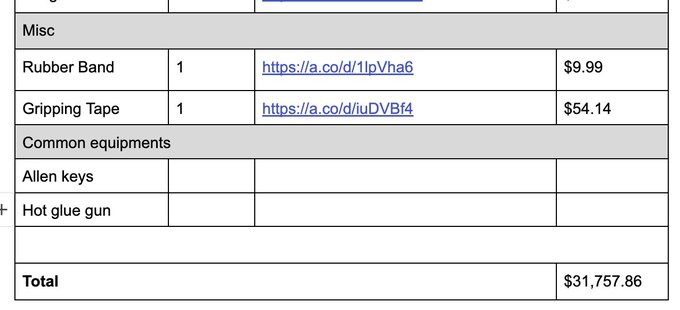
around $8k including all the accessories like the depth cam and the Jetson compute board
1
1
6
Thanks Jim for the spotlight and great summary!!
More details at

This is Open Robot Parkour: the agility at Boston Dynamics level, but now open-source for everyone.🐕
Two NVIDIA tech here at play:
1. IsaacGym: train the robot dog by speeding up reality 10,000x with massively parallel simulation on GPU.
2. NVIDIA Jetson NX for onboard compute.
43
295
1K
0
0
5
Amazing home robot results from
@shikharbahl
!
How can we enable robots to perform diverse tasks? Designing rewards or demos for each task is not scalable.
We propose WHIRL which learns by watching a single human video followed by autonomous exploration *directly* in the real world (no simulation)!
14
152
754
0
1
4
Chechout our
#CVPR2022
paper at poster 124a now!
Today at
#CVPR22
, we present our paper on visual navigation with legged robots in the morning.
Our robot learns to walk (low-level) and plans (low-level) the path to a goal avoiding dynamic as well as "invisible" obstacles thanks to the coupling of vision with proprioception.
2
20
205
0
0
4
@allenzren
@tonyzzhao
@chelseabfinn
Thanks Allen! We found two parallel-jaw gripper are powerful, but maybe two dex hands are even better!
0
0
4
@thetjadams
Yes, you can modify the training pipeline for another quadrupedal robot by re-training with the URDF of that robot.
0
0
3
This work is done jointly with
@whshkan
and
@pathak2206
A detailed explanation thread can be found here:
2/
An arm can increase the utility of legged robots. But due to high dimensionality, most prior methods decouple learning for legs & arm.
In
#CoRL
'22 (Oral), we present an end-to-end approach for *whole-body control* to get dynamic behaviors on the robot.
7
47
298
1
0
3
@pathak2206
@tonyzzhao
@chelseabfinn
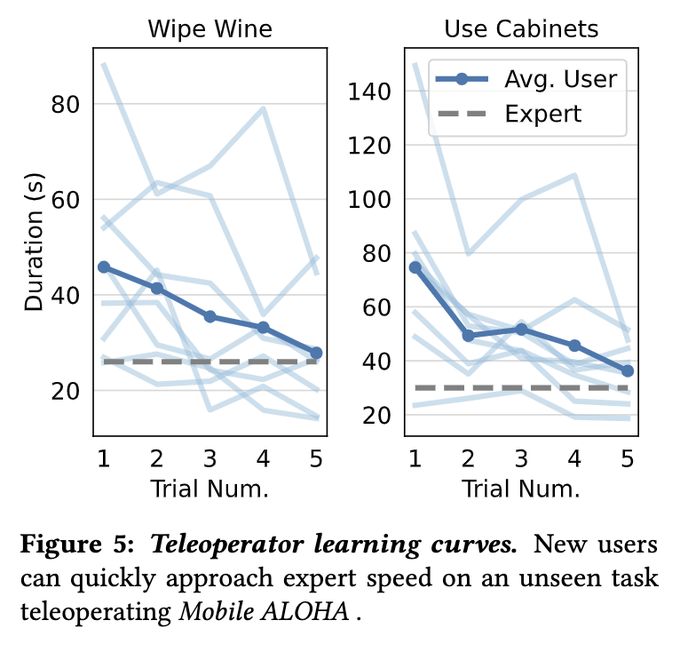
Turns out people without prior exp with mobile aloha can approach the teleop speed of
@tonyzzhao
and I after 5 trials of practice.
0
0
3
@viktor_m81
@UnitreeRobotics
Thanks Viktor! In addition to Isaac Gym, it also uses a Nvidia Jetson board for onboard network inference!
0
0
2
Apparently, my co-author & friend Xuxin Cheng changed his twitter handle 😛. He can be found here:
@xuxin_cheng
0
0
2
0
0
2
@pathak2206
@StanfordAILab
@ashishkr9311
@CarnegieMellon
Thanks Deepak!! I learned a lot from you! Super fortunate to be advised by you!
0
0
1
@Ransalu
@charlesjavelona
@tonyzzhao
@chelseabfinn
@StanfordAILab
Thanks for your interest! We will release all the details shortly!
0
0
1
1
0
1
@antoniloq
@ziwenzhuang_leo
@chelseabfinn
@zhaohang0124
@wang_jianren
@StanfordAILab
Thanks Antonio! Love your recent pursuit-evasion project!
0
0
1

0
0
1
0
0
1
0
0
1