

Katherine Liu
@robo_kat
Followers
114
Following
388
Media
0
Statuses
95
Senior Research Scientist @ToyotaResearch, previously Robotics PhD @MIT_CSAIL. Excited about machine learning for embodied intelligence. Opinions my own!
Joined April 2018
I love robot videos, and there are some quite interesting ones to check out on our project. Excited to share the results of the team’s work, and glad to have been a core contributor — go check out the paper because there are a lot of interesting details!

TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: https://t.co/n0qmDRivRH One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the
0
0
7
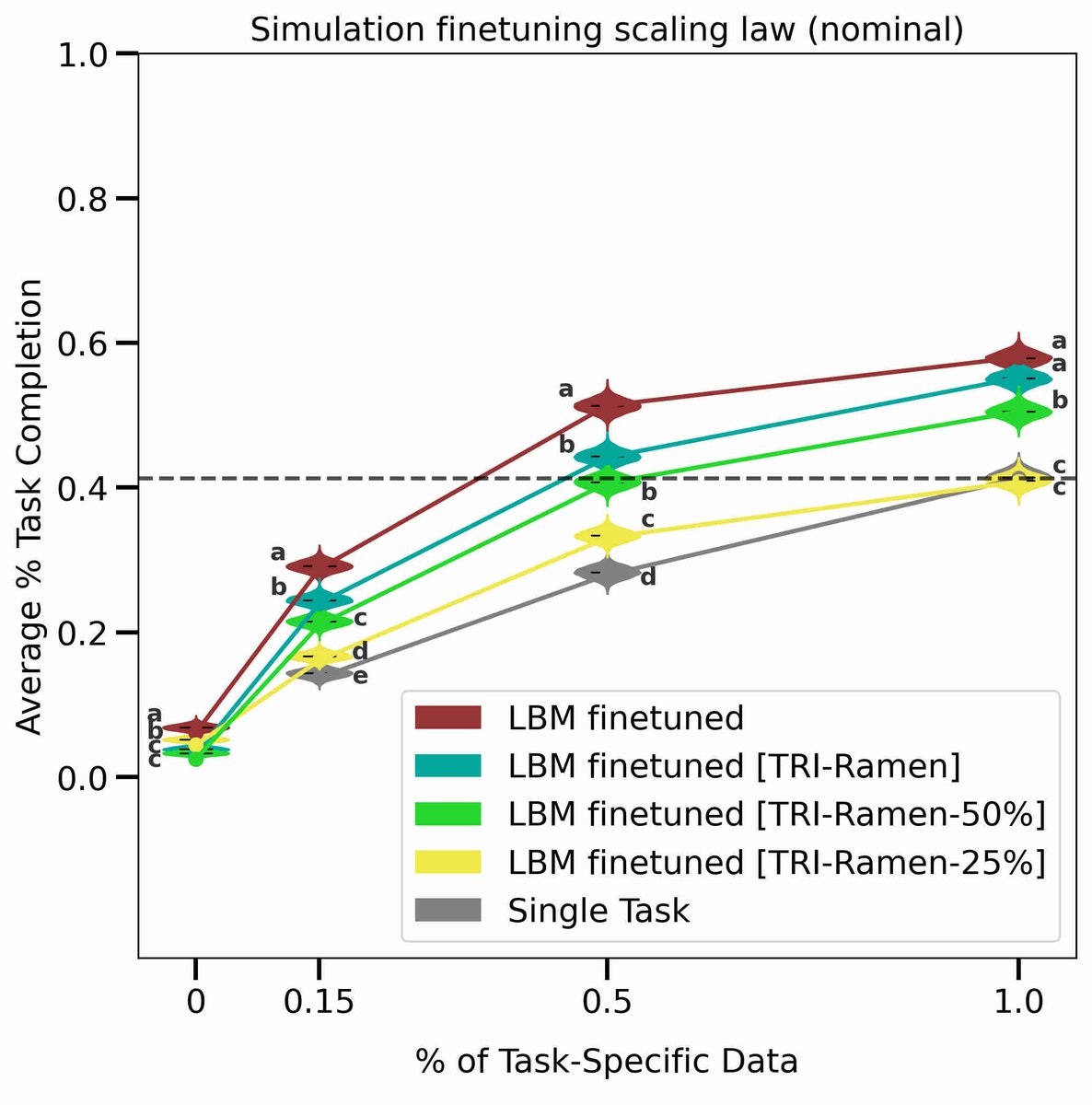
Probably my favorite plot from the paper, which sums it all up, is this one. The plot compares performance using different amounts of pretraining data used before training a new task: 0% (aka single task), 25, 50, or 100% of TRI’s data, then 100% of TRI’s data + all of the
2
3
36

🚀Thrilled to share what we’ve been building at TRI over the past several months: our first Large Behavior Models (LBMs) are here! I’m proud to have been a core contributor to the multi-task policy learning and post-training efforts. At TRI, we’ve been researching how LBMs can
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: https://t.co/n0qmDRivRH One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the
3
29
185

have been waiting for this release! Robotics needs rigorous and careful evaluation now more than ever 🦾
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: https://t.co/n0qmDRivRH One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the
1
5
65
At @ToyotaResearch, we've been studying how LBMs can help robots learn faster and better. We built a rigorous evaluation pipeline to benchmark LBM performance with statistical confidence. Results suggest that pre-training on hundreds of tasks yields 80% data savings on new tasks.
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: https://t.co/n0qmDRivRH One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the
1
1
24

Awesome paper on robot foundation models with super rigorous evaluation. Definitely a must-read!
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: https://t.co/n0qmDRivRH One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the
0
1
42

Can we learn a 3D world model that predicts object dynamics directly from videos? Introducing Particle-Grid Neural Dynamics: a learning-based simulator for deformable objects that trains from real-world videos. Website: https://t.co/1PWPdVTFAk ArXiv: https://t.co/oSIBKtUTbk
4
34
168

**Steerability** remains one of the key issues for current vision-language-action models (VLAs). Natural language is often ambiguous and vague: "Hang a mug on a branch" vs "Hang the left mug on the right branch." Many works claim to handle language input, yet the tasks are often

🤖 Does VLA models really listen to language instructions? Maybe not 👀 🚀 Introducing our RSS paper: CodeDiffuser -- using VLM-generated code to bridge the gap between **high-level language** and **low-level visuomotor policy** 🎮 Try the live demo: https://t.co/sLlTIyFu19 (1/9)
0
24
132
How can we achieve both common sense understanding that can deal with varying levels of ambiguity in language and dextrous manipulation? Check out CodeDiffuser, a really neat work that bridges Code Gen with a 3D Diffusion Policy! This was a fun project with cool experiments! 🤖
🤖 Does VLA models really listen to language instructions? Maybe not 👀 🚀 Introducing our RSS paper: CodeDiffuser -- using VLM-generated code to bridge the gap between **high-level language** and **low-level visuomotor policy** 🎮 Try the live demo: https://t.co/sLlTIyFu19 (1/9)
1
7
12
We recently launched https://t.co/mshIJSnIYu as a community-driven effort to pool UMI-related data together. 🦾 If you are using a UMI-like system, please consider adding your data here. 🤩🤝 No dataset is too small; small data WILL add up!📈
4
42
248
🚀
I'm super excited to start a great new collaboration with the fantastic team at Boston Dynamics. Scott Kuindersma and I chatted with Evan Ackerman about it earlier today. https://t.co/LjyldS6HBS
0
0
1

With grad school admissions being open now, I'd like to re-share our list with all the awesome faculty at MIT that work in #AI and #ClimateChange
https://t.co/QW0JNpjKhk
@ClimateChangeAI @MIT @eapsMIT @MITCSConsortium @priyald17 @sarameghanbeery
github.com
🌍 A curated list of MIT faculty that tackle climate change with machine learning for applying students, undergraduates, or others - GitHub - blutjens/awesome-MIT-ai-for-climate-change: 🌍 A curate...
0
3
16

Check out our #ECCV2024 paper on "Zero-Shot Multi-Object Scene Completion"! Drop by poster 313 this morning if you're interested! Website: https://t.co/iMYwLdqVpi Code&Dataset: https://t.co/d6hjNrYYIL
0
5
25
Read this thread! Then go read the paper 😀

Evaluation in robot learning papers, or, please stop using only success rate a paper and a 🧵 https://t.co/3cUad03GUl
0
0
3

🥁 Speakers Announced! 🥁 The #WiCV workshop at @eccvconf is thrilled to announce our amazing speakers: @dimadamen, @ftm_guney, Stella Yu, Hedvig Kjellström, and dinner speaker @HildeKuehne! 🎤 Join us on Monday 2pm-6pm 🇮🇹#ECCV2024! Full program here: https://t.co/AWTk18jXqf

0
13
69
We are grateful to be awarded an oral presentation -- please come by Wed 10/2 at 1:30pm (I believe we are the first talk in the oral session) as well as the poster session afterward (number 156) at 4:30pm! #ECCV2024 🎉

Excited to share our new paper on large-angle monocular dynamic novel view synthesis! Given a single RGB video, we propose a method that can imagine what that scene would look like from any other viewpoint. Website: https://t.co/uhY9NdWAPt Paper: https://t.co/beb3W8ojOr 🧵(1/5)
3
3
27

My group will be seeking new PhD students in the coming cycle! The best way to reach us is to apply to the @MITEECS PhD program. I look for independent, creative, interactive, supportive, passionate, bright students who want to work on fundamental problems with a geometry flavor.
4
38
247

What is a really really hard problem to work on in #AI? My own answer is Spatial Intelligence - a technology that could empower and enable countless possible use cases in creation, design, learning, AR/VR, robotics, and beyond. It’s a real honor that my cofounders @jcjohnss

Hello, world! We are World Labs, a spatial intelligence company building Large World Models (LWMs) to perceive, generate, and interact with the 3D world. Read more: https://t.co/El9rgi6bxQ

124
384
2K
Do you actually know how well your policy works? Excited to have folks like @imp_aa and co. pushing on this front.

Check out our open-source STATS package https://t.co/alpkMQtJER if you are a roboticist tasked with quantifying policy performance with success/failure labels, and are wondering how to get the tightest confidence interval estimates out of a small set of policy rollouts.
0
0
1

👇Introducing DPPO, Diffusion Policy Policy Optimization DPPO optimizes pre-trained Diffusion Policy using policy gradient from RL, showing 𝘀𝘂𝗿𝗽𝗿𝗶𝘀𝗶𝗻𝗴 𝗶𝗺𝗽𝗿𝗼𝘃𝗲𝗺𝗲𝗻𝘁𝘀 over a variety of baselines across benchmarks and sim2real transfer https://t.co/uOkkcnVFCf
5
93
476