
Russ Tedrake
@RussTedrake
Followers
2K
Following
7
Media
1
Statuses
22
Professor at MIT, studying robotics. Vice President of Robotics Research, Toyota Research Institute.
Joined July 2022
RT @TheHumanoidHub: Boston Dynamics and Toyota Research Institute are advancing humanoid robotics with Large Behavior Models (LBMs) for Atl….
0
250
0
This was a massive effort by the entire team, with a number of individuals really pouring their hearts into this paper. The paper is packed full of (too many?) details. Your comments and feedback would be very welcome.
0
0
14
Probably my favorite plot from the paper, which sums it all up, is this one. The plot compares performance using different amounts of pretraining data used before training a new task: 0% (aka single task), 25, 50, or 100% of TRI’s data, then 100% of TRI’s data + all of the
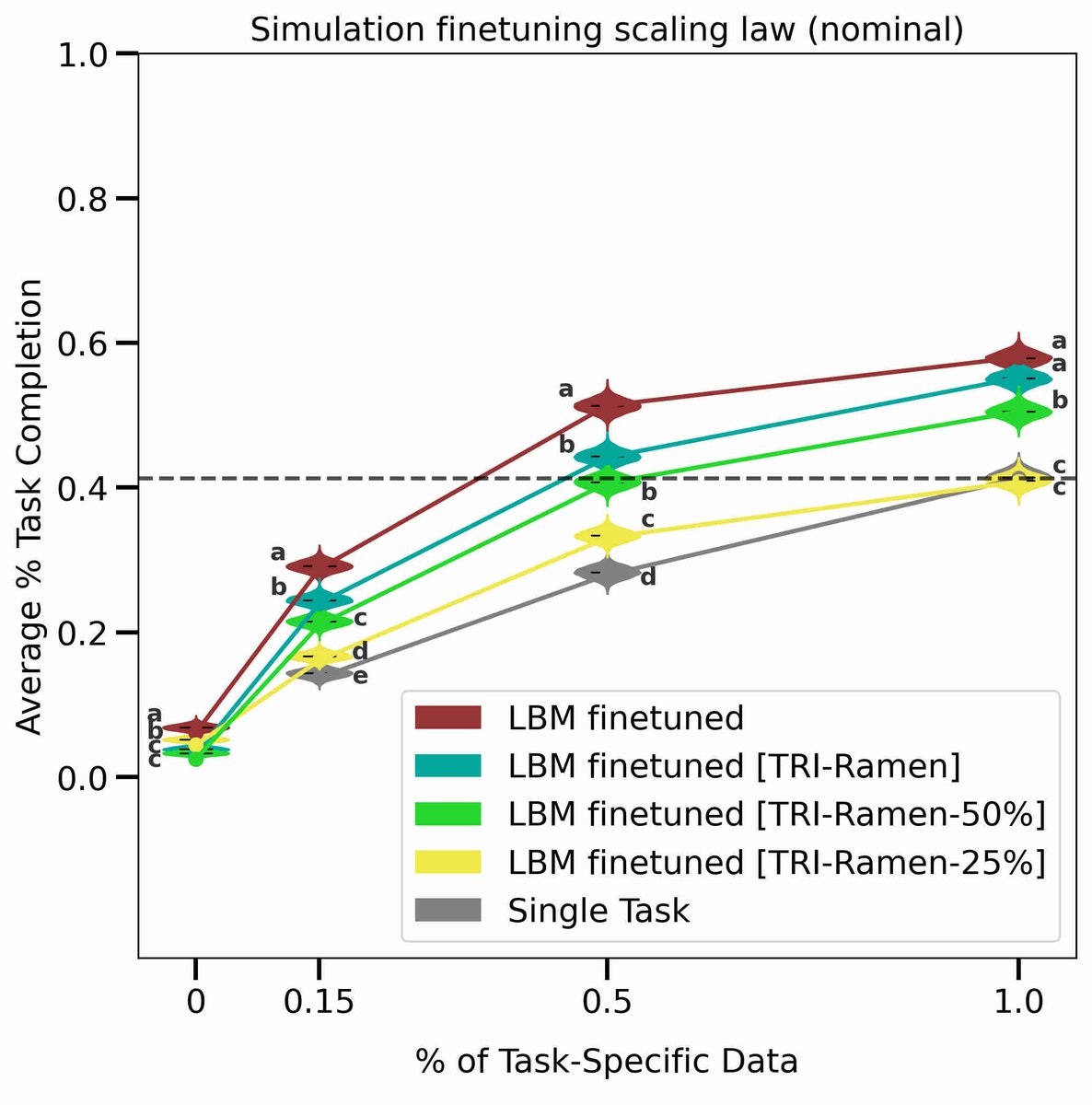
2
3
36
The short version is: LBMs work! We see consistent and statistically significant improvements as we increase the amount of pretraining data. But doing the science is still hard; as a field we have more work to do to improve the statistical power of our experiments.
1
1
20
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the.
8
107
485
Very proud of Nicholas, who recently shared (for physics-quality assets from a small amount of interaction with a robot) and is now following up with his work on scene-level generation.
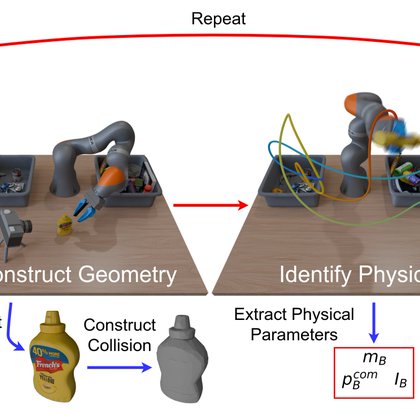
scalable-real2sim.github.io
A fully automated pipeline that generates simulation-ready assets for real-world objects—no manual intervention required!

Want to scale robot data with simulation, but don’t know how to get large numbers of realistic, diverse, and task-relevant scenes?. Our solution:.➊ Pretrain on broad procedural scene data.➋ Steer generation toward downstream objectives. 🌐 🧵1/8
1
7
72
In my mind, it's a bit like a biology paper that is focused on a particular animal model. I hope we'll learn more quickly from each other if we can make precise, substantiated claims about particular setups, so that as a field we can assemble those claims into a coherent picture.
0
0
10
Side note: I'm proud of the title of this paper, which we intentionally made pretty narrow/specific. I think that some of the most important work that we have to do as a field right now is careful empirical work to interrogate the properties of these models that we're creating.
0
0
15
One of the most interesting take-aways for me is that "high-performing policies need to know whether they are executing in sim or in real." A number of implications flow from that, including that sim+real cotraining can decrease performance if the visual gap is too small.
0
0
2
This work really sharpened my thinking about sim+real cotraining.

Learning from both sim+real data could scale robot imitation learning. But what are the scaling laws & principles of sim+real cotraining?. We study this in the first focused analysis of sim+real cotraining spanning 250+ policies & 40k+ evals (1/6)

3
4
56
RT @NicholasEPfaff: New Paper: "Scalable Real2Sim: Physics-Aware Asset Generation via Robotic Pick-and-Place Setups"! 🤖. We introduce a ful….
0
23
0
RT @BoyuanChen0: Announcing Diffusion Forcing Transformer (DFoT), our new video diffusion algorithm that generates ultra-long videos of 800….
0
90
0
I'm super excited to start a great new collaboration with the fantastic team at Boston Dynamics. Scott Kuindersma and I chatted with Evan Ackerman about it earlier today.
spectrum.ieee.org
The partnership aims to make Atlas into a general-purpose humanoid
9
42
422
RT @LerrelPinto: This #RSS2024 on July 19, we are organizing a tutorial on supervised policy learning for real world robots!. Talks by @not….
0
26
0
RT @BoyuanChen0: Introducing Diffusion Forcing, which unifies next-token prediction (eg LLMs) and full-seq. diffusion (eg SORA)! It offers….
0
212
0
RT @chris_j_paxton: And if you’re at all interested in humanoids you need to check out Punyo, from TRI, a soft-body humanoid capable of who….

medium.com
By: Alex Alspach and the Punyo team
0
2
0
RT @KennethCassel: a bit surprised TRIs new robot has gotten little love on X . current humanoid approaches seem very hand centric but we u….
0
4
0
RT @SongShuran: Check out @chichengcc's step-by-step tutorial on building the UMI gripper. We really hope to see more UMIs running in the w….
0
3
0
RT @chichengcc: Can we collect robot data without any robots?. Introducing Universal Manipulation Interface (UMI). An open-source $400 syst….
0
352
0