

kabilan KB
@kabilankb2003
Followers
152
Following
414
Media
107
Statuses
180
Nvidia ambassador Freedom and value Robot enthusiast YouTube tutorial based on ROS https://t.co/nBPPJZtAOz
Joined August 2023
RT @IlirAliu_: The first universal 3D robot viewer for the browser… load URDF, MJCF, or USD in seconds. No installs. No setup. Developer….
0
99
0
Controlling XLeRobot in Isaac Sim with a real LeRobot arm 🤖. ✅ Real robot sends joint position commands → sim mirrors actions.✅ Cameras in sim provide data for AI + VLA training.✅ A step closer to bridging Sim2Real for embodied AI 🚀 @LightwheelAI kitchen asset . #IsaacSim
0
0
1
Just wrapped up a demo 🎥.👉 XLeRobot + NVIDIA Isaac Sim in a kitchen env .👉 Operated with a real robot arm for limitation learning 🤖.🔜 Blog + YouTube tutorial coming soon:.⚡ Reinforcement Learning.⚡ VR Teleoperation + AI models.⚡ Groot N1.5 integration
1
12
97
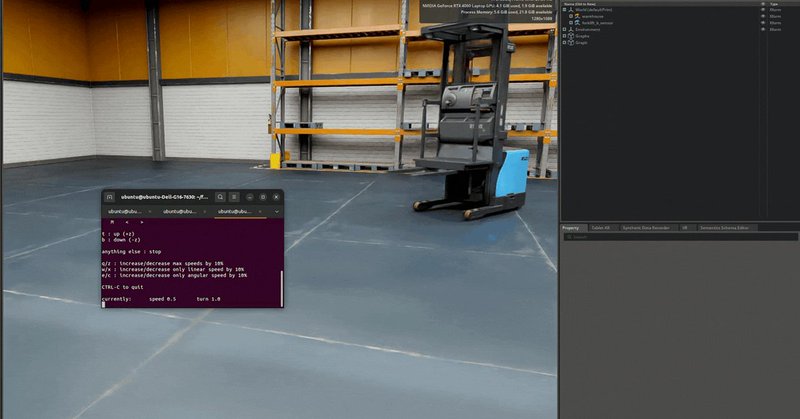
Just finished building a photorealistic forklift in NVIDIA Isaac Sim — with full wheel + lift control, onboard sensors, and ROS2 integration! 🚜💡.🔜 Next stop → Hardware-in-the-Loop on Jetson Orin Nano with:#NVIDIA
medium.com
Intro:
0
0
0
RT @_fracapuano: We shipped @LeRobotHF to its first major release, on Pypi and GitHub. Alongside the team at @huggingface we’re making rob….
0
12
0
Forklift in Isaac Sim just got real!.✅ Lift up/down.✅ AprilTag docking.✅ VSLAM + NVBlox + Nav2.🧠 Powered by Isaac ROS on Jetson Orin Nano.📦 Full sim-to-real loop for warehouse automation.Blog dropping soon. Stay tuned! 🔥.#IsaacSim #IsaacROS #JetsonOrinNano #ROS2 #Forklift
0
0
12
Using ROS2 + Jetson, I teleoperate a robot in the real world, while its twin mirrors every move in Isaac Sim. This is how we bridge Sim2Real. 📽️ Watch + Read the blog 👇.🔗 #IsaacSim #Sim2Real #ROS2 #Jetson #DigitalTwin

0
0
2
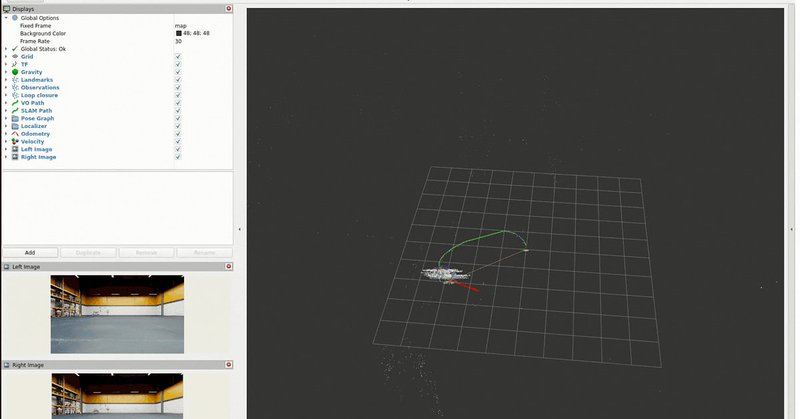
New blog!.Build real-time #VSLAM in #ROS2 using stereo cameras + IMU and power up your robot’s navigation stack with GPU acceleration 🧠📍.🔗 Learn how to connect it with #Nav2 and enable loop closure + visual-inertial odometry:.👉 #Robotics #Jetson.
medium.com
As autonomous systems transition from simulation to the real world, the need for accurate perception and robust localization becomes…
1
5
15
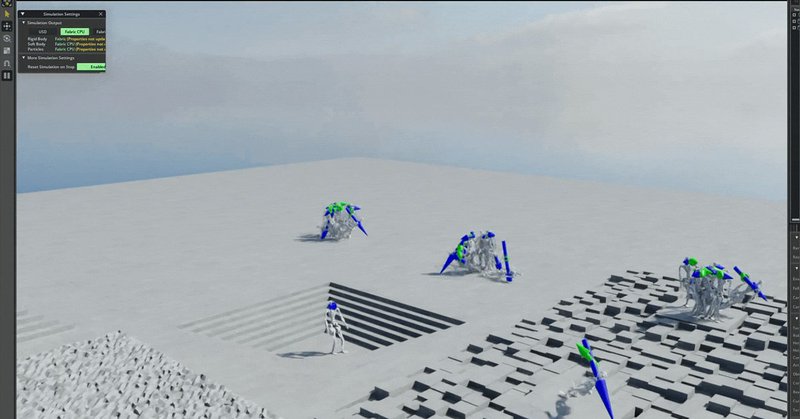
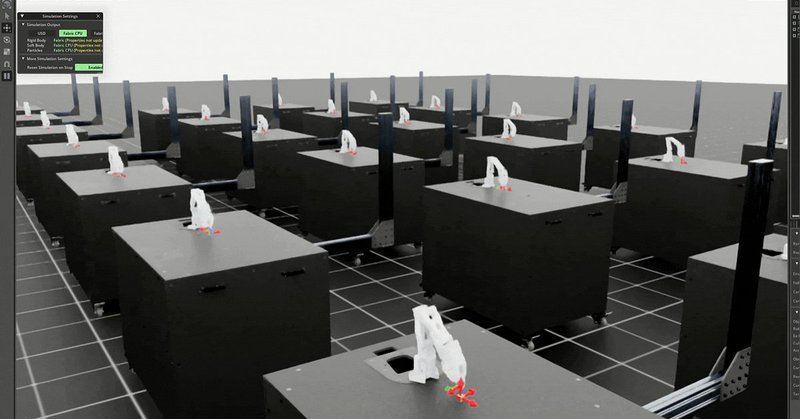
🚨 New blog out: Training a Humanoid Robot to Walk using Isaac Lab + Isaac Sim.Walk through:.1.Asset & task setup.2.Manager-based RL workflow.3.Wrappers for terrain switching.4.Export .pt policy.5.Test in Isaac Sim.Read here:
medium.com
Humanoid robots like the FFTAI-GR1T2 hold incredible promise — they could someday navigate our homes, workplaces, and even dangerous…
0
0
2
Building Custom Humanoids in Isaac Lab: My Next Blog Post Sneak Peek!We'll cover:.Manager-based workflow explained.Detailed configuration.Humanoid asset setup.Robot-specific fine-tuning.Seamless training & deployment.Perfect for anyone keen on advanced humanoid simulation and RL
0
0
3
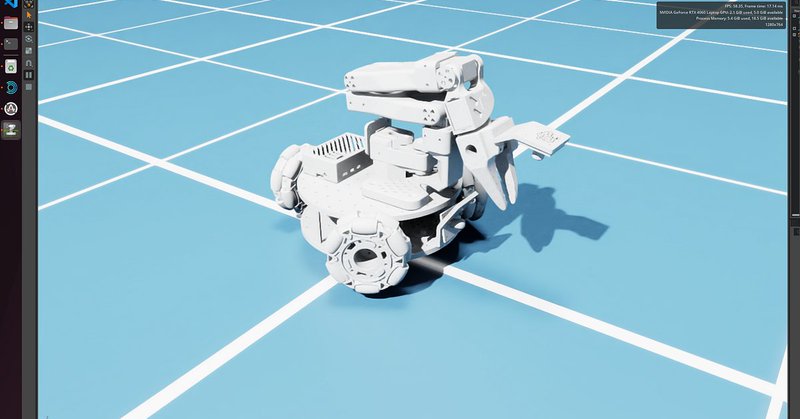
Thrilled to share the journey of LeKiwi! 🚀 My new open-source mobile manipulator project, built with #IsaacSim, #IsaacLab & #ROS2. From URDF to HIL, read about our progress & plans for AI + real-world deployment. Blog:
medium.com
Bringing Open-Source Robotics to Life Through High-Fidelity Simulation and AI
0
5
15
We're exploring how #teleoperation in #IsaacLab helps teach the SO-100 arm. we're now gathering human demos for #ImitationLearning.Our latest dives into using keyboard control for the SO-100 and collecting data (RGB, joint states, gripper, actions).
1
0
2
Just released: Lekiwi URDF for Isaac Sim! @huggingface @NVIDIARobotics .Simulate the Lekiwi mobile manipulator with high-fidelity URDF fully compatible with NVIDIA Isaac Sim and ROS 2. Accurate visuals. Open source & ready to use.Check it out here my 👉

0
0
4
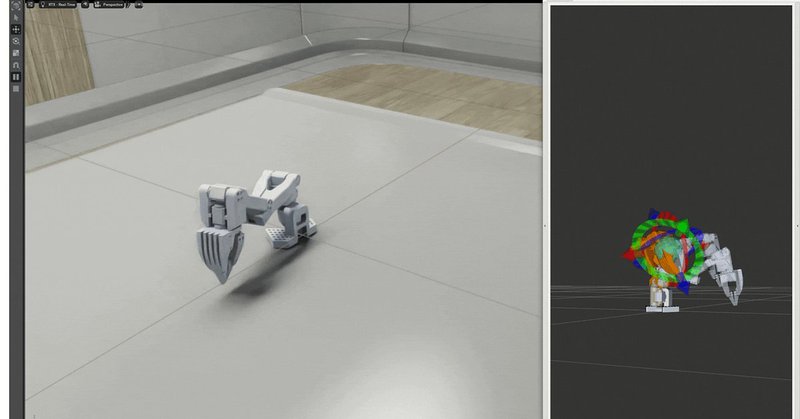
Training the SO-100 robot to lift a cube in simulation using Isaac Lab + skrl!.🔍 In my latest blog:.1Why use Isaac Lab for RL?.2Manager-based modular task design.3Deploying trained policies in simulation.Step-by-step guide from setup to deployment.
medium.com
Introduction to Isaac Lab and the SO-100 Cube Lifting Task
0
0
0

Excited to share my latest work on setting up LeRobot using the Isaac Sim standalone API and integrating it with ROS2 & MoveIt for motion planning! 🛠️.
medium.com
Introduction
0
1
3
I'm exploring the Leader-Follower concept in robotics, where the Leader is controlled in RViz, and the Follower replicates the motion in Isaac Sim. Using ROS2 rosbag, I can record the leader's movements and replay them on the follower, enabling seamless teleoperation and motion

0
3
14