

Frank Dellaert
@fdellaert
Followers
15K
Following
14K
Media
189
Statuses
3K
Robotics & Computer Vision Professor at Georgia Tech, and part-time CAIO at Verdant Robotics. Before: stints at KUL, Skydio, Facebook B*8, Google AI.
San Mateo, CA
Joined June 2008
My Annual Reviews article on Factor Graphs in Robotics is finally out with a publicly accessible link: https://t.co/Xc0RMXyeYY
9
99
464
LeJEPA is making waves.Having played around with Dino (which is great) I do appreciate the LeJEPA effort to have a heuristics-free, first-principles approach to SSL. Very promising are the small dataset pre-training vs. transfer learning results in the paper. Modulo alg 1 issue.

LeJEPA: a novel pretraining paradigm free of the (many) heuristics we relied on (stop-grad, teacher, ...) - 60+ arch., up to 2B params - 10+ datasets - in-domain training (>DINOv3) - corr(train loss, test perf)=95% Paper: https://t.co/NpfB9G1pOP Code: https://t.co/BsK5wmNEHc
2
7
84


Exciting expansion! @Waymo now serves the whole SF Bay Area Peninsula from SF to San Jose and is taking riders on freeways. https://t.co/fNgqQtHB7b
344
539
8K
Wow, walking in a GS reconstruction is pretty cool. Try to find the castle (another environment) and entering. It’s wild.

北アルプスで最も美しい火山湖「みくりが池」の室堂周辺を丸ごと3D化し、アバターで歩けるようにしました。 どなたでもArrival Spaceからご覧いただけます。 URL: https://t.co/s79tdiycLP
0
0
14
I was one of the 510 (!!) area chairs for #ICCV2025 :-) Check out this report, with a great overview of best paper candidates.

We've released the ICCV 2025 Report! https://t.co/WoQKQqQnTz Compiled during ICCV in collaboration with LIMIT.Lab, cvpaper.challenge, and Visual Geometry Group (VGG), this report offers meta insights into the trends and tendencies observed at this year's conference. #ICCV2025
2
11
71

Can’t beat them? Connect your broker to trade like them.
0
40
536
This! If we can’t all work in OCaml, at least impose a “non-imperative” coding discipline.

When I started working in python, I got lazy with “single assignment”, and I need to nudge myself about it. You should strive to never reassign or update a variable outside of true iterative calculations in loops. Having all the intermediate calculations still available is
1
0
8

X-mas came earlier this year! Nvidia has just released the huge Physical AI AV Dataset - 1727 hrs of driving data: 310K clips of 20s - sensor rig: 7 cameras, lidar, radar - 25 countries, 2.5K cities from US + Europe Kudos to Kashyap Chitta et al.! https://t.co/eslW53rFQ2
2
24
179

Representation representation representation #SpatialAI See the SLAM Handbook Chapter 18 for my views! https://t.co/EdTa9zcl5F

github.com
Release repo for our SLAM Handbook. Contribute to SLAM-Handbook-contributors/slam-handbook-public-release development by creating an account on GitHub.

The hot topic at #ICCV2025 was World Models. They come in different flavors — (interactive) video models, neural simulators, reconstruction models, etc. — but the overarching goal is clear: Generative AI that predict and simulate how the real world works.
2
15
160
Georgia Tech winning streak brings out the fans :-) Midtown Atlanta in the background.

The scene at Bobby Dodd Stadium at the start of the second quarter
0
0
4

Apps used to run your business. Now your business builds the apps. 🧬 Create tailored solutions for bookings, inventory, finance, operations, and more in minutes. No code. No setup. Just creation.
0
4
7
Cool work by @taherehtoosi on how learned priors can be used to reinforce recognition of ambiguous stimuli, including visual illusions and Gestalt predictions.

How does our brain excel at complex object recognition, yet get fooled by simple illusory contours? What unifying principle governs all Gestalt laws of perceptual organization? We may have an answer: integration of learned priors through feedback. New paper with Ken Miller! 🧵
0
1
15
GLIM: amazing LIDAR-based SLAM built with @gtsam4
0
15
192

🛰️ Excited to share Skyfall-GS - the FIRST method to create real-time navigable 3D cities from satellite imagery alone! We transform multi-view satellite images into immersive 3D scenes you can freely fly through! 🚁✨ 🌐 Project Page: https://t.co/QsLVaD7mAg 1/5
6
65
345
I guess Lego is trademarked :-)

🏆 Excited to share that BrickGPT ( https://t.co/yvi8cyrArX) received the ICCV Best Paper Award! Our first author, @AvaLovelace0, will present it from 1:30 to 1:45 p.m. today in Exhibit Hall III. Huge thanks to all the co-authors @RuixuanLiu_ @RamananDeva @ChangliuL @junyanz89
0
0
1

!!! GET WELL QUICKLY SENATOR JOHN FETTERMEN AND REMEMBER JESUS LOVES YOU !!!
5
6
161
GaussGym looks amazing!
Simulation drives robotics progress, but how do we close the reality gap? Introducing GaussGym: an open-source framework for learning locomotion from pixels with ultra-fast parallelized photorealistic rendering across >4,000 iPhone, GrandTour, ARKit, and Veo scenes! Thread 🧵
1
1
10
Codex is working incredibly well for me inside VS code.
GPT-5-Codex, optimized for agentic coding, is rolling out to @code now! Try it out and let us know what you think. https://t.co/43Gcu5Fp4t
1
0
17
Cool visualizations and fast bundle adjustment on GPU.

InstantSfM: Fully Sparse and Parallel Structure-from-Motion TLDR: InstantSfM is a fully sparse and parallel Structure-from-Motion pipeline. It leverages GPU acceleration to achieve up to 40× speedup over traditional methods like COLMAP, while maintaining or improving
0
8
117

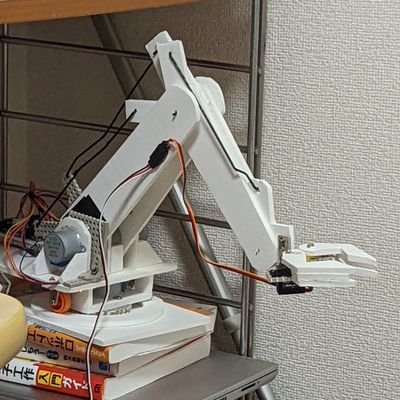
This DLR paper is quite remarkable: accurate touch localization without artificial skins, just force and torque sensors in the joints. There is some learning in this paper, but you don’t need it to get touch points/trajectories. Non-paywalled link below.

𝗗𝗟𝗥 𝗿𝗲𝘀𝗲𝗮𝗿𝗰𝗵𝗲𝗿𝘀 𝗴𝗮𝘃𝗲 𝗮 𝗿𝗼𝗯𝗼𝘁𝗶𝗰 𝗮𝗿𝗺 𝗳𝘂𝗹𝗹-𝗯𝗼𝗱𝘆 𝘁𝗼𝘂𝗰𝗵 𝘀𝗲𝗻𝘀𝗶𝘁𝗶𝘃𝗶𝘁𝘆 𝘄𝗶𝘁𝗵 𝗻𝗼 𝗮𝗿𝘁𝗶𝗳𝗶𝗰𝗶𝗮𝗹 𝘀𝗸𝗶𝗻 𝗻𝗲𝗲𝗱𝗲𝗱. They used internal force-torque sensors at 8 kHz + deep learning. The robot can feel where you touch it,
1
0
12

Luxury just got more precise! LVMH’s Watch Division is taking a minority stake in Swiss movement maker La Joux-Perret from Japan’s Citizen Group, deepening its access to high-end, Swiss-made movements at scale. This strategic move strengthens the backbone of TAG Heuer, Hublot,
1
3
6
Amazing stuff!

Unitree G1 Kungfu Kid V6.0 A year and a half as a trainee — I'll keep working hard! Hope to earn more of your love🥰
0
0
1
Incredible work!

Real time online 3D reconstruction of 3D scene and humans represented with SMPL. https://t.co/SMsxP4iZhT I don't get tired of looking at these results
0
1
13