
赤見坂@AGIRobots
@aakamisaka
Followers
2,924
Following
1,178
Media
635
Statuses
4,805
大学院生です|人と共生できるAIとロボットを開発したい|専用: @AGIRobots |YouTube:|ブログ:| @ReazonHILab の研究プロジェクトに参加してます
名古屋市
Joined November 2019
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
اليوم الوطني
• 1290369 Tweets
Lebanon
• 983606 Tweets
لبنان
• 671607 Tweets
الاهلي
• 410261 Tweets
Zelensky
• 142289 Tweets
Bills
• 112410 Tweets
連休明け
• 39551 Tweets
Dolph
• 35635 Tweets
#grandefratello
• 33110 Tweets
John Deere
• 29987 Tweets
Vince
• 28715 Tweets
津波注意報
• 26658 Tweets
كاس الملك
• 24766 Tweets
季節の変わり目
• 18365 Tweets
#WWERaw
• 17039 Tweets
Jaguars
• 16332 Tweets
アップル
• 13681 Tweets
Capriles
• 13550 Tweets
Pac-12
• 13126 Tweets
津波情報
• 13111 Tweets
#ラヴィット間違い探し
• 12245 Tweets
Monday Night Football
• 11275 Tweets
Josh Allen
• 11231 Tweets
鳥島近海
• 10414 Tweets




















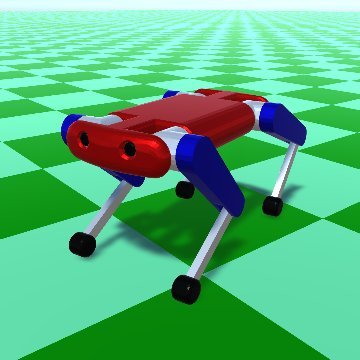
こういうのを見ると、家庭用ロボットって必ずしも人間のような顔でなくても良いというのを感じる

6
486
2K
GPT-4が恐ろしいほど馬鹿になってる。
だいぶ前、UnityのC#コードをリファクタリングする際に、とても重宝したのに、今は、C#のコードを共有したのに、プログラムコードが共有されてないと言ったり、Pythonで答えてきたり。
一体どうなってんの。知能レベル10分の1以下くらいになってないか?
9
394
1K
かなり乱暴なことしても転ばないな。
Go1の安定性はA1に比べて圧倒的に良くなってる。
足先の4つの空気圧センサーとIMUだけでこの性能はすごい。
8
244
1K
日本語が使えて、エッジで動き、商用利用可能な大規模言語モデルとか強すぎ。
絶対試す!

2
90
449
久しぶりに記事を執筆しました。
Transformerで使われるAttentionにおいて核心的な仕組みであるScaled Dot-Product Attentionの凄さは一体どこにあるのか、論文を簡単に調査しつつ、私なりの考えをまとめたものです。

0
66
405
スイス連邦工科大学チューリッヒ校の学生らによるプロジェクト「Dyana」が結構凄い。
YouTubeには簡単な組み立てアニメーションが乗ってて、いろいろ参考になりそう。
スイス連邦工科大学ってロボットの研究が盛んだよね。




2
75
358
ROSを触ったことない人が、ROS環境(noetic)の導入から、パッケージ作成、ノード作成、Pub/Sub通信まて、たった一コマ分の時間で学習できるように説明してくれるYouTube動画が神すぎた

0
40
253
アリエクにはブラシレスって書いてあったけど、これ、本当にブラシレスか...?(笑)

そういえば、つい先日、FEETECHの新型サーボが届いた。
何よりもサイズと軽さに驚いた。
これでいてトルクが30kgcm、トルク制御可能、ブラシレスモータ、値段は8000円は凄い。
サイズ感が分かるように、DYNAMIXELのXC430-T150と並べてみた。


1
6
79
2
25
225
Unitree Go2が発売されるらしい。
ChatGPTやリモートセンシング搭載で22万円からとか凄すぎ。
ChatGPTの技術をふんだんに使ってそうな感じだな。
知能が一気に高くなった感じの動作だ。

3
59
216
ロボットにおいてアクチュエータって命のようなものだし、何とか良いものが個人開発できないかと思い、昨日から突貫工事で設計したもの。
ちなみにモータのロータやステータコイルも全部自作する設計です。



4
15
168
凄すぎて感動!
FlexGenで大規模言語モデルが手元のマシンで動くのはやばすぎ。
割と応答早いし。
革命が起きてる。

3
27
157
UnityでUnitree Go1の歩行をシミュレートするための制御プログラムを作成するときに、4脚ロボットの順運動学と逆運動学を導出する必要があったのですが、導出にかなり苦戦したので、備忘録として、「4脚ロボットの順運動学と逆運動学」に関する記事も作成しました。

2
19
152
久しぶりに解説記事を書きました。
画像でもゼロショット学習が可能であることを示したCLIPについてです。
CLIPはマルチモーダルAIや基盤モデルなどにおいて基礎を成している重要な仕組みです。
最後らへんでCross Attentionとの類似性について私なりの考えを述べました。
0
30
150
こう考えると、強化学習を使った研究ってかなり退屈な説ある(アルゴリズムやアーキテクチャの研究は除く)。「良い報酬関数を見つけました!」っていうのは、「良いプロンプトを見つけました!」っていうレベルと何ら変わらん(?)
つまり何が言いたいかというと、プロンプトエンジニアリングは、強化学習の報酬設計とやっていることはほぼ同じだということ。
0
23
107
1
29
150
ChatGPTのもとになっている、InstructGPTについて解説動画を出しました。InstructGPTでは、RLHFと呼ばれる強化学習手法が用いられいます。RLHFはロボットの強化学習でも使用できるもので、人手による評価から報酬予測モデルを獲得し、それを使って強化学習を行う手法です。

2
41
148
自律移動ロボットの追従や障害物回避でよく使われているローカルパスプランニング手法であるDWA(Dynamic Window Approach)について解説記事と解説動画を出しました。よかったら見てくれると嬉しいです。

1
34
146
Decision Transformerの解説記事と動画を作成しました。
Decision Transformerは強化学習をTransformerと報酬による条件付き系列モデリングにより実現する手法です。
記事:
動画:

0
25
148
私がCyberGear用に作成した遊星歯車減速機をGitHubに公開しました。
組み立て動画もアップしていますので参考にしてみてください。

0
39
145
DockerでFlexGenを使ってみまたので、備忘録記事を作成しました。
FlexGenを使うためのDockerfileを記載しているので、興味がありましたら、試してみてください!

1
38
143
4脚ロボットの脚の形状によって、呼び名はないのか気になってたのですが、以下の論文が4種類の4脚ロボットについて良い感じの命名をしてました。

1
25
144
四足歩行ロボットの歩行を実現させるためのフレームワークがあるらしい。

1
31
137
RWKVの記事も書きました。
RWKVは、Attention Free Transformerと類似した、Weighted Key Value方式を採用しています。
WKVの計算を漸化式で表された状態変数で導出できるようにすることでRNNの利点である高速な推論と処理可能なシーケンス長を大幅に向上しました。

0
20
137
強化学習ライブラリの有名どころと、強化学習アルゴリズムの対応状況をすべて調査&ブログにまとめました。
モデルフリー強化学習ならPFRLとStable Baselines3が、
モデルベース強化学習ならRLlibがよさそうです。

1
18
133
本日は、前回のベイズフィルタの解説に続き、カルマンフィルタについての解説記事と解説動画を公開しました!
よければ見てくれると嬉しいです!
解説動画:
解説記事:

0
21
134


備忘録記事を書きました。
Champを使うにはURDFを含むロボット関連のファイルが
ROSパッケージになっている必要があるようなので、オリジナル設計したURDFをROSパッケージにする際の暗黙のルール(?)みたいなところを調べて試して記事にした感じです。

0
27
119
久しぶりに記事を執筆しました。
内容は、Attention Free Transformerについてです。
Multi-Head Attentionと内積注意を無くすことで大幅な計算コスト低減を実現した代表例です。

0
20
110
4脚ロボットの歩行のための足先軌道生成ライブラリを作成しました。
作成したライブラリ名はFoot Trajectoryです。スプライン軌道、サイン軌道、ベジェ軌道に対応しています。
今後、機能を追加していければと思ています。
リポジトリ:
使い方:

0
29
110
CyberGearの減速機の試作を作成中。
内歯車との噛み合いが少し悪いけど原因は造形の性質上、ギアの1層目が想定サイズより大きくなってるからで、これは何度か回してるうちに馴染みそう。
1
16
108
Sparse Attentionの解説記事を作成しました。

0
17
108
つまり何が言いたいかというと、プロンプトエンジニアリングは、強化学習の報酬設計とやっていることはほぼ同じだということ。
強化学習における報酬の考え方が、LLMのプロンプトに応用されている印象。
DeepMindのGatoは、Decision Transformerにおける報酬入力をプロンプトへと変化させた。
すなわち、Decision Transformerは報酬値で行動の質を条件付けていたが、今のLLMはプロンプトで行動(出力)の質を条件付けてる。
0
9
56
0
23
107
凄い量のロボットをシミュレータの中で同時に動かして強化学習を行うことで学習が高速化するのは確かなんだが、改めて動画見ると凄いな。
Learning to Walk in Minutes Using Massively Parallel Deep RL
@YouTube
より


0
30
107
順運動学と逆運動学について解説記事を作成しました。
独学なので内容に不安はありますが、はりきって執筆したので、1記事の分量がA4用紙30ページ程度になりました。

0
16
107

片腕完成。
動作確認したところ問題なく動作。
ただし、パワーありすぎて手で持った状態で動かすのは無理ゲーすぎたので、台を作る。

1
7
95
今、名古屋はAIやロボットなどIT関連のベンチャーが本当に少なくて、若者の流出が大都市の中でぶっちぎりで悲惨な状況なんですよね。
正直それを止める救世主になりたいとも思ってるんですよね(私が)。
私と同じようにそれを何とかしたいと考えている名古屋近辺在住の方いたらお話ししたいです。
5
17
93


Unity Robotics Hubの理解を深めるべく、今からPick-and-Place Tutorialを進められるところまで進めるぞー!
0
13
92

ここ最近、自分もISAAC LABに入門して、強化学習してますが、驚くほど便利ですね。
コードが沢山あるので、はじめは驚きましたが、編集や追加しないといけないコードは結構少なくて、だいたい近くにまとまっているので、非常に使いやすい印象を持ちました。



0
12
87

めちゃくちゃ多種多様なパスプランニングのアルゴリズムが実装されているライブラリをみつけた。

0
12
86
GitHubで公開することにしました!
今週中の公開を目指したいと思います。

いま、実験してるCyberGearの減速機ですが、かなりのトルクと耐久性がありそうなので、オープンにしようか迷ってます。
オープンにしたら結構需要ありますかね?
需要ありそうだったらオープンにしようと思います。
0
14
68
0
15
86
GPT-4に作成して欲しいニューラルネットワークのイラストを見せるだけで、PyTorchを使ったネットワークを実装してくれるの凄すぎる。
TCNの部分は省略されてるけど、GitHubを探せばコードは見つかるし、大枠示してくれるだけでも十分凄い。


1
13
83
我ながら、自分が人型を提案したときにボロクソに言われた経験に対するショックと怒りが、自分の中には根強く残ってるんだなぁと改めて。人型が話題になるたびに愚痴ってしまう。
汎用AI搭載の人型を開発したくて今年は個人事業主になり、来年は法人化を検討中。精神的にも大人にならねば。
0
10
79
そういえば、つい先日、FEETECHの新型サーボが届いた。
何よりもサイズと軽さに驚いた。
これでいてトルクが30kgcm、トルク制御可能、ブラシレスモータ、値段は8000円は凄い。
サイズ感が分かるように、DYNAMIXELのXC430-T150と並べてみた。
1
6
79
エナメル線を巻いてみた!
かっこいいー


ロボットにおいてアクチュエータって命のようなものだし、何とか良いものが個人開発できないかと思い、昨日から突貫工事で設計したもの。
ちなみにモータのロータやステータコイルも全部自作する設計です。
4
15
168
1
18
75
Walker Sの導入コストは650万円から810万円らしい。
日本も同程度まで安くできないと世界の土俵で戦えなさそうだ。
1
28
75
ROS-LLMっていうのを見つけた!

1
20
74

Jetson AGX XavierにFlexGenをインストールして大規模言語モデルを動作させることに成功しました!!!
XavierでFlexGenを動かしている様子を動画で公開しています!:
JetsonでFlexGenを試すためのコードを以下の記事で公開しています!:

3
24
74

今回、ICRAに来てるヒューマノイドについて調査する中でアクチュエータが非常に小さくても軽く100Nm超えるようなものが沢山あることを知りました。
私が作成したCyberGearは理論上の最大トルクは42Nmですが、取得可能角度の範囲を120度に限定すれば更に3倍程度のトルクにできるので試そうと思います。
私がCyberGear用に作成した遊星歯車減速機をGitHubに公開しました。
組み立て動画もアップしていますので参考にしてみてください。
0
39
145
1
11
68
いま、実験してるCyberGearの減速機ですが、かなりのトルクと耐久性がありそうなので、オープンにしようか迷ってます。
オープンにしたら結構需要ありますかね?
需要ありそうだったらオープンにしようと思います。

0
14
68
ルールベースの4脚歩行制御プログラムを強化学習モデルから操作してもらえないかと思い強化学習をしてみた。
どうやら、バックでゴールに向かう戦略を学習してしまったようだ。
1
8
62
本日はベイズフィルタの解説記事と動画を公開しました!
ベイズフィルタは自己位置推定をはじめとした逐次的な状態推定問題において基礎となる重要な仕組みです。
もしよければぜひ見ていただけると嬉しいです!
動画:
記事:

0
12
62


先日は「4脚ロボット勉強会」にご参加いただきまして本当にありがとうございました。
私の発表スライドをアップロードしました。
まだ不慣れですが、幾つか課題が明確になったので今後の運営に役立たせ改善してまいります!
今後ともよろしくお願いいたします。

0
11
59
画像のせるの忘れてた

これ、パーツの設計がゆるゆるだからベアリング対応するだけで実用性上がりそうなんだよな。あと、親指部分に自由度の追加も必要だけど。
0
0
5
0
4
59
人型ロボットをつくりたいという話をすると、「ロボットが人型である意味とは?」ということを必ず聞かれるんだけど、明確に答えられないんですよね。
今の自分にはなんとなく人型ロボットに凄い将来性を感じているから作りたいのだとしか言えない。
5
6
55
高2でここまで様々な技術を理解してロボットを作成できるとは凄いな!

0
9
55
強化学習における報酬の考え方が、LLMのプロンプトに応用されている印象。
DeepMindのGatoは、Decision Transformerにおける報酬入力をプロンプトへと変化させた。
すなわち、Decision Transformerは報酬値で行動の質を条件付けていたが、今のLLMはプロンプトで行動(出力)の質を条件付けてる。
0
9
56
Unityでオリジナルの強化学習環境を作ってMLAgentsで学習する方法を解説したYouTube動画が凄い参考になった。
これにプラスαでUnity Robotics HubのC#スクリプトを作成すればUnityとロボットの実機をつないで、学習済みの強化学習モデルで実機の制御ができるな。

0
9
54
この論文で紹介されてる4脚ロボットの脚の構造は結構面白いな。
既製品のサーボで作れそうだし、時間があれば作ってみたい。



0
8
54

モデル予測制御とかではなくて、強化学習でここまでできるんだ。
ANYmalとかでも山登りを強化学習ベースで実現してるし、同じようなやり方で2足歩行もできるってことなんだろうか。

72
2K
5K
0
13
52
ロボット用の高トルクサーボモータを開発中!
ヘッドの部分は減速比1:15のサイクロ減速機で、使用するモータは大型ドローン用の高馬力なもの。
市販のラジコン用ESCだと低速回転は難しいのでオリジナルのブラシレスドライバを設計中!
その他、ESP32に搭載可能なAIを開発してサーボに搭載したい!




0
5
50
勢いで、自分のサイトにプレスリリースを書いた。

修論をほぼ書き終えた反動で一気に設計してしまった😅
でも、だいぶ形になってきた~!
グリッパー付けると結構モバイルヒューマノイドっぽくなる。
あと首にはVLP16を付与してて、つくチャレにも出れる仕様にしてる。

0
2
27
0
9
52
来週にGPT-4が発表されるのか。マルチモーダルな言語モデルらしいです。俗に言うLLM+と言うやつですね。
画像処理や音声認識、ちょっとした手などが付いたコミュニケーションロボットなどへの応用研究が進みそう。

0
10
50
右からチラッと一瞬だけ見えるのはテレオペレーターの手のコントローラ??
このデータ使って模倣学習なり強化学習する気だな。
今のはやりのやり方。

0
13
50

この動きだよこの動き!!
Isaac SimにはデフォルトでANYmalを試せる機能付いてて神過ぎる!
ちなみに、デフォルトでなぜかつま先とんとんするの可愛い~w
0
9
49
Z世代は、優秀な人とそうでない人の2極化が顕著になっただけだと思う。
本気で取り組もうと思えば没頭できる環境だし、逆に落ちようと思えば、娯楽も多いしどん底まで落ちる。
0
6
49