
Ruohan Zhang
@RuohanZhang76
Followers
1,048
Following
425
Media
6
Statuses
75
Postdoc @stanfordsvl @StanfordAILab ; robot, brain, art; climbing, soccer, cooking, music, dance
Joined September 2021
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
Back to Back
• 1247306 Tweets
Drake
• 435304 Tweets
Kendrick
• 435263 Tweets
#23point5EP9
• 415138 Tweets
#ขวัญฤทัยEP10
• 300730 Tweets
Sant Rampal Ji Maharaj
• 252198 Tweets
ONGSASUN LOVEBIRDS
• 215157 Tweets
Ole Miss
• 96436 Tweets
Euphoria
• 89385 Tweets
Reus
• 71454 Tweets
Sony
• 58935 Tweets
猫の恩返し
• 44324 Tweets
Porto Alegre
• 41834 Tweets
#الهلال_التعاون
• 41201 Tweets
#ساعه_استجابه
• 38074 Tweets
Taylor Made
• 19691 Tweets
まことお兄さん
• 18450 Tweets
ウズベキスタン
• 18289 Tweets
Kdot
• 18227 Tweets
Leclerc
• 15400 Tweets
D-3 to BLOSSOM
• 14335 Tweets
Al Green
• 13878 Tweets
Jack Antonoff
• 13670 Tweets
Father's Day
• 13026 Tweets
Odell
• 12103 Tweets
冒頭10分
• 11608 Tweets
Helldivers 2
• 10535 Tweets















Pinned Tweet

Introducing our new work
@corl_conf
2023, a novel brain-robot interface system: NOIR (Neural Signal Operated Intelligent Robots).
Website:
Paper:
🧠🤖
20
186
757
Envisioned by many, brain-robot interface (BRI) stands out as a thrilling but challenging research topic.
It is an exciting time for BRI research. Brain signal decoding and robot intelligence are improved a lot by modern machine learning algorithms.
1
2
28
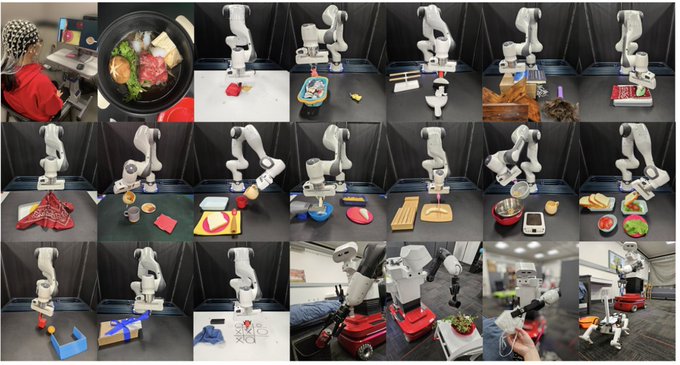
NOIR is a general-purpose, intelligent BRI system that enables humans to command robots to perform 20 challenging everyday activities using their brain signals, such as cooking, cleaning, playing games with friends, and petting a (robot) dog.
1
3
28
With 10-minute calibration for each session, 3 human participants successfully accomplished 20 long-horizon tasks (4-15 subtasks). On average, each task requires 1.8 attempts to succeed with an average task completion time of 20 minutes.
2
1
22
Project co-lead by amazing
@sharonal_lee
,
@minjune_hwang
,
@ayano_hiranaka
,
@chenwang_j
,
With
@wensi_ai
,
@RyanRTJJ
,
@Shreyagupta08
, Yilun Hao,
@GabraelLevine
,
@RuohanGao1
Advised by Prof. Anthony Norcia,
@drfeifei
,
@jiajunwu_cs
2
1
18
NOIR uses non-invasive EEG devices to record brain activities. We decode human intention, including what object to interact with (via SSVEP), how to interact (motor imagery), and where to interact (motor imagery).

1
2
17
The effectiveness of NOIR is improved by few-shot robot learning algorithms that are based on foundation models. This allows NOIR to adapt to individual users, predict their intentions, and reduce human time and effort.
1
0
16
NOIR holds a significant potential to augment human capabilities and enable critical assistive technology for individuals who require everyday support. We hope NOIR paves the path for future BRI research!
1
0
15
Decoded human intention signals are communicated to our robots. These robots are equipped with 14 pre-defined parameterized primitive skills, such as Pick(object,x,y,z).
1
0
14
Proud to be part of the amazing BEHAVIOR team, hope to see you at our Tutorial on Monday!

Do you want to learn to train and evaluate embodied AI solutions for 1000 household tasks in a realistic simulator? Join our BEHAVIOR Tutorial at
#ECCV2022
: Benchmarking Embodied AI Solutions in Natural Tasks!
Time: Monday, Oct 24th 14:00 local time (4:00 Pacific Time)
10
69
424
0
1
14
Check out our recent article
@gradientpub
for training decision AI with human guidance! The original JAAMAS review paper was written with Faraz Torabi
@GarrettWarnell
@PeterStone_TX
.

How do humans transfer their knowledge and skills to artificial decision-making agents?
What kind of knowledge and skills should humans provide and in what format?
@RuohanZhang76
, a postdoc at
@StanfordSVL
and
@StanfordAILab
, provides a summary:
👇
1
4
15
0
1
11
Excited to be part of this NeurIPS workshop, if you are interested in attention, please consider submitting your work!

We invite you to submit papers (up to 9 pages for long papers and up to 5 pages for short papers, excluding references and appendix) in the NeurIPS 2022 format. All submissions will be managed through OpenReview submission website. See Call For Papers 4/N
1
0
2
0
1
10
Check out our new work on using foundation model for robot manipulation!

How to harness foundation models for *generalization in the wild* in robot manipulation?
Introducing VoxPoser: use LLM+VLM to label affordances and constraints directly in 3D perceptual space for zero-shot robot manipulation in the real world!
🌐
🧵👇
10
141
580
0
0
8
In honor of our upcoming
@NeurIPSConf
workshop on "All Things Attention", and the fact that the deadline for you to submit your work has been extended to **Oct 3**, I present a thread on attention and decision making in AI!
The Submission Deadline has been extended to Oct 3, 2022 (11:59PM AoE)
@NeurIPSConf
Consider submitting your work to our workshop
@attentioneurips
See details here:
1
2
5
1
2
7
Real world performance is amazing.

Robot visual navigation in unseen homes is hard: end-to-end RL works well in sim but gets only 23% real-world success.
Today, in the first real-world empirical study of visual navigation, we show Modular Learning achieves 90% success in unseen homes!
1/N
3
48
241
0
1
4
Glad to be part of the team and thanks
@sunfanyun
for the lead. Come to talk to us at
@NeurIPSConf
this year!

How can we effectively predict the dynamics of multi-agent systems?
💥 Identify the relationships. 💥
We are excited to share IMMA at
#Neurips2022
, a SOTA forward prediction model that infers agent relationships -- simply by observing their behavior.
1/
2
4
24
0
0
3
0
0
2
0
0
1
@chenwang_j
it’s a pleasure to work with you and this team. The key insight is that for robot learning from humans, data for training high-level planer and low-level visuomotor skills can be different. PLAY data is a good candidate for learning to plan.

How to teach robots to perform long-horizon tasks efficiently and robustly🦾?
Introducing MimicPlay - an imitation learning algorithm that uses "cheap human play data". Our approach unlocks both real-time planning through raw perception and strong robustness to disturbances!🧵👇
20
144
742
1
0
1
Amazing work!

Our language decoding paper (
@AmandaLeBel3
@shaileeejain
@alex_ander
) is out! We found that it is possible to use functional MRI scans to predict the words that a user was hearing or imagining when the scans were collected
15
81
232
0
0
1