
Xiaolong Wang
@xiaolonw
Followers
18K
Following
4K
Media
344
Statuses
1K
Associate Professor @UCSDJacobs Postdoc @berkeley_ai PhD @CMU_Robotics
San Diego, CA
Joined March 2016
After one year of effort from @RchalYang , EgoVLA is finally released. I think about this as training cross-embodiment VLA, with human as just another kind of robot. EgoVLA essentially provides a smart way to align the action space from different embodiments for dexterous.

How can we leverage diverse human videos to improve robot manipulation?. Excited to introduce EgoVLA — a Vision-Language-Action model trained on egocentric human videos by explicitly modeling wrist & hand motion. We build a shared action space between humans and robots, enabling
0
5
113
RT @LerrelPinto: I had a wonderful time talking to @robotknower and Niko Ciminelli for @SemiAnalysis_'s article on Robotics Levels of Auton….
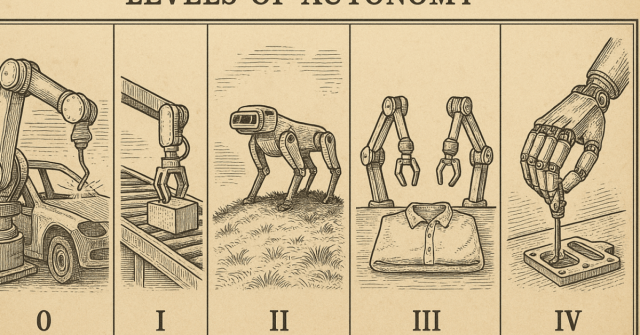
semianalysis.com
Robots have powered manufacturing for decades, yet they stayed single-purpose and thrived only in perfect settings. Previous attempts at intelligent machines overpromised and underdelivered. But th…
0
14
0
Check out what our old friends are building at skild! Strong team and diverse applications. Humanoid robots are coming more and more to live!.

Modern AI is confined to the digital world. At Skild AI, we are building towards AGI for the real world, unconstrained by robot type or task — a single, omni-bodied brain. Today, we are sharing our journey, starting with early milestones, with more to come in the weeks ahead.
3
2
41
RT @RchalYang: How can we leverage diverse human videos to improve robot manipulation?. Excited to introduce EgoVLA — a Vision-Language-Act….
0
74
0
RT @binghao_huang: Tactile interaction in the wild can unlock fine-grained manipulation! 🌿🤖✋. We built a portable handheld tactile gripper….
0
52
0
RT @yswhynot: Missed our RSS workshop? Our recordings are online: All talks were awesome, and we had a very fun pa….
youtube.com
Advances in artificial intelligence and robotics have increasingly relied on better algorithms or larger datasets while often overlooking the critical role of hardware. In this workshop, we aim to...
0
3
0
RT @Stone_Tao: this is really cool. and readily popular / reproducible enough to the point i’m finding people making the sensor in the dept….
0
2
0
3 years of dexterous manipulation workshops down the road since 2023: Great to see the progress in the field.
Excited to be organizing the dexterous manipulation workshop at #RSS2025 — great energy and lots of interest in dexterous manipulation! Come by in OHE 122!


0
1
24
RT @kenny__shaw: Excited to be organizing the dexterous manipulation workshop at #RSS2025 — great energy and lots of interest in dexterous….
0
3
0
An upgrade on ACE with a cleaner design, force feedback, and gravity compensation.

🚀 Meet ACE-F — a next-gen teleop system merging human and robot precision. Foldable, portable, cross-platform — it enables 6-DoF haptic control for force-aware manipulation. 🦾 See our demo & talk at the Robot Hardware-Aware Intelligence workshop this Wed @RoboticsSciSys!
0
0
6
RT @Hi_Im_RuiYan: 🚀 Meet ACE-F — a next-gen teleop system merging human and robot precision. Foldable, portable, cross-platform — it enable….
0
19
0
RT @xyz2maureen: We have spent nearly a year from building this work to the time of a solid release. And it does accurately working towards….
0
8
0
We finally released Dex1B #RSS2025! Our group has been working on sim2real dexterous manipulation for the last 4 years and this is a milestone showing a grasping policy purely trained in sim with 1B data, and transfer to real world deployment without any fine tuning. The devils.

How to generate billion-scale manipulation demonstrations easily? Let us leverage generative models! 🤖✨. We introduce Dex1B, a framework that generates 1 BILLION diverse dexterous hand demonstrations for both grasping 🖐️and articulation 💻 tasks using a simple C-VAE model.
7
13
90
RT @kaylee_keyi: The generative model faces challenges in feasibility🔧(lower success rate compared to deterministic models) and diversity🙌(….
0
5
0
RT @jianglong_ye: How to generate billion-scale manipulation demonstrations easily? Let us leverage generative models! 🤖✨. We introduce Dex….
0
89
0