

Simon LC
@simonlc_
Followers
558
Following
373
Media
27
Statuses
81
research scientist @ the AI institute robotics & optimization phd @ stanford
New York
Joined September 2019
I am really happy to finally share this work! Huge congrats to @albert_h_li and @pdculbert for the effort they put in making the tool hackable and interactive. Try it!🐍.pip install judo-rai.

🥋 We're excited to share judo: a hackable toolbox for sampling-based MPC (SMPC), data collection, and more, designed to make it easier to experiment with high-performance control. Try it: pip install judo-rai
0
1
1
RT @XuanlinLi2: Learning bimanual, contact-rich robot manipulation policies that generalize over diverse objects has long been a challenge.….
0
18
0
RT @pdculbert: ICYMI: For #CoRL2024 we released a dataset of 3.5M (!) dexterous grasps, with multi-trial labels and perceptual data for 4.3….
0
1
0
We're presenting Jacta: a versatile planner for learning dexterous and whole-body manipulation this week at CoRL!.website paper

Our team is presenting work at the Conference on Robot Learning, @corl_conf, in Munich, Germany this week! Learn more about our accepted research —
0
1
12
This is a joint work with an amazing team! Jan Brüdigam, Ali Abbas, @initmaks, @KuanFang, Brandon Hung, Maya Guru, Stefan Sosnowski, Jiuguang Wang and Sandra Hirche.Jan did an awesome job leading the project during his internship at @the_ai_inst. So proud of what we accomplished!.
0
0
0
We used reinforcement learning bootstrapped with expert planner demonstrations to learn robust policies. We deployed them on several hardware scenarios using Boston Dynamics' Spot


1
0
0
We demonstrate the versatility of the planner on large set of manipulation tasks featuring intrinsic and extrinsic dexterity.
1
0
0
I'm excited to share Jacta: A Versatile Planner for Learning Dexterous and Whole-body Manipulation. We use sampling-based planning to bootstrap policy learning methods for manipulation tasks. My friend, Jan Brüdigam is presenting the work today at CoRL!.
3
13
71
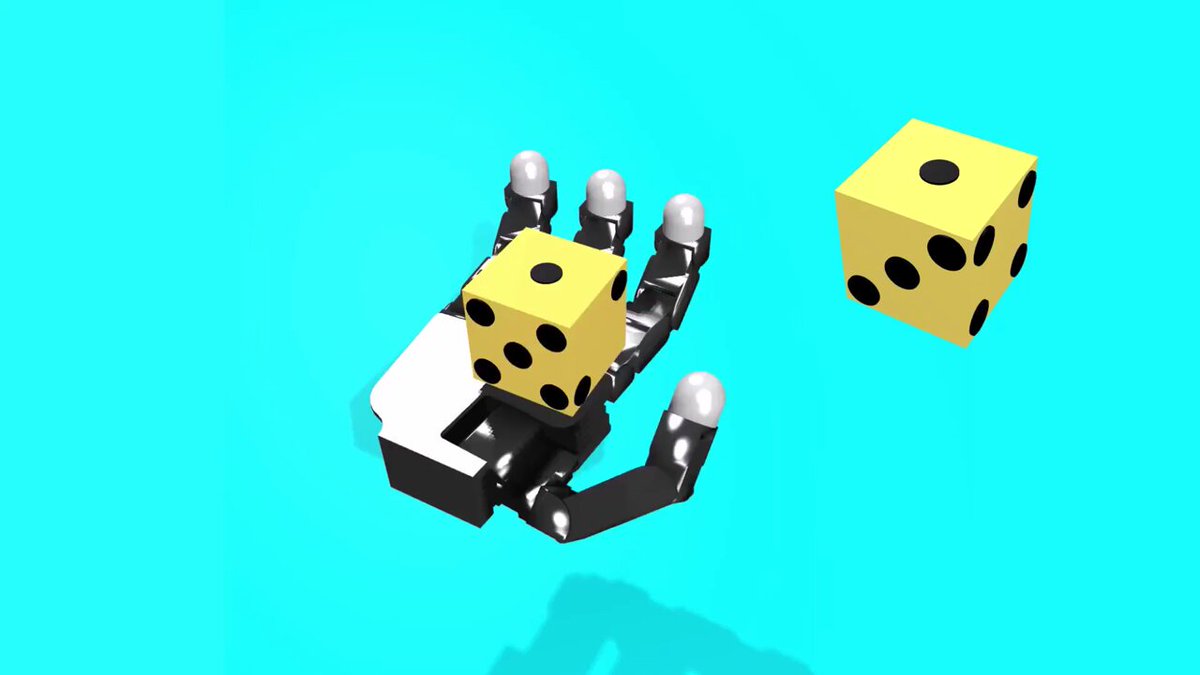
RT @albert_h_li: Excited to share our new📰, DROP: Dexterous Reorientation via Online Planning!. Overview:.🔹We tackle cube rotation🧊♻️on har….
0
25
0
Really cool work on bimanual dexterity!!.

Achieving bimanual dexterity with RL + Sim2Real!. TLDR - We train two robot hands to twist bottle lids using deep RL followed by sim-to-real. A single policy trained with simple simulated bottles can generalize to drastically different real-world objects.
1
0
4
RT @naokiyokoyama0: Excited to share our latest work, Vision-Language Frontier Maps – a SOTA approach for semantic navigation in robotics.….
0
38
0
RT @johnzhangx: want your next robot 🤖 to move like your favorite pet 🐶? youtube videos might be all you need. checkout our recent work -….
0
52
0
This is a collab with a wonderful team! @Koven_Yu @shellguo95 @taylorhowell @RuohanGao1 @jiajunwu_cs @zacinaction @MacSchwager.
0
0
1
I'm super happy to share that our work on differentiable physics simulation of NeRF-represented objects was published in RA-L! We augment object-centric NeRFs with dynamical properties (e.g. friction properties). paper: video:
1
29
114
RT @yuvaltassa: Some screen-captures of MuJoCo MPC's Quadruped task. 100% open-source, go play!.
0
14
0
RT @kevin_zakka: Introducing 𝗥𝗼𝗯𝗼𝗣𝗶𝗮𝗻𝗶𝘀𝘁 🎹🤖, a new benchmark for high-dimensional robot control! Solving it requires mastering the piano wi….
0
232
0
RT @DannyDriess: What happens when we train the largest vision-language model and add in robot experiences?.The result is PaLM-E 🌴🤖, a 562-….
0
512
0
RT @thomas__lew: 📢Excited to share our #ICRA2023 work on robotic table wiping via RL + optimal control!.📖 🎥 https:/….
0
7
0

0
3
0