

Robostadion ロボスタディオン秋葉原(Open maker fab)
@robostadion
Followers
2K
Following
21K
Media
697
Statuses
5K
ロボットや電子工作を作る場所、コワーキング利用可!ロボットphysical AIの駆け込み寺!秋葉原のロボット部室、末広町駅徒歩1分、デジタルツインDiscordサーバー⇢https://t.co/PeEK9QSjiY 格闘ロボとアイドルロボの興行も企画します。トイレは温水洗浄便座
東京都千代田区外神田6-11-16GMビル1階
Joined April 2021
ロボットは必ず人間みたいに世界モデルを脳内つまりローカルで作って、そこに自分を当てはめて現実世界と比べてどう動くかを考えるようになるのは間違いない。変な宗教やってなければ人間はスタンドアローンで動いてるので基本はロボットもスタンドアローンで全部やるべき!応用でネット使っても良いよ

なぜNVIDIAがフィジカルAI の話をし始めたのか、という点も、この辺を加味して考えると面白い
0
0
3
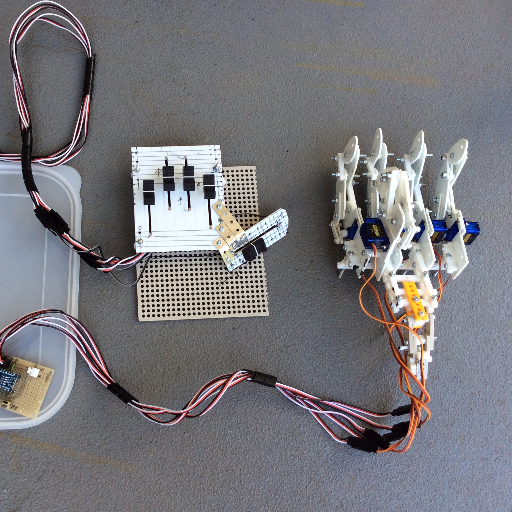
これで身長160cm級ロボットのゆうくんの右腕のサーボを魔改造150kgf・cmサーボに換装して無線マスタースレーブ出来るメドがついた! 無線技術習得前にロボットのフレームとサーボ配置を先にやっておいて良かった😊
0
0
15
ディアブロが入ったデスクトップPCをみんなで持ち寄ったLANパーティ! LANパーティ!!!!!

皆んなでMacを持ち込んでAIパーティーするのかなぁ
0
0
1

SCHAFTはだいたい2週間で1世代、ロボットのバージョンを更新するペースで走っていたと聞く。 当時と違っていまや生成AIの寄与で開発速度の更なる向上がトレンド。 1週間で1世代の更新ペースを維持しなければグローバルで勝負にならない。
0
1
14
つ、強そう! so101armはこれからいろんな下半身に搭載されていく未来がありますねぇ

The lion doesn’t concern herself with finals instead she goes to Waterloo to build a cardboard hexapod with friends instead
0
1
7

From rugged terrain to soft fabrics, this droid handles it all. 🤖 With Newton, the open-source physics simulation engine co-developed by @GoogleDeepMind and Disney Research, Walt Disney Imagineering, robots can move through shifting sand or gravel and manipulate delicate
9
50
294

採算合わなくていいから日本でこれやりたい。たたむだけじゃなくて洗濯機への投入と取り出しもやりたい。

Our robots have a new cheerleader :) We’ve been quietly deploying our robots to more businesses across the Bay Area. Drop by @seabreezesf in Noe Valley and see for yourself!
1
4
19

ネコミミ心拍シリーズ?に興味を持ってくれた方がいらっしゃいますので再掲します。アホらしい作例をまとめておりますので、こちらをどうぞ💁
0
2
7

REK America was amazing in LA with hundreds of attendees. But we have an even bigger venue tonight in Austin. Because everything is bigger in Texas. Welcome to the sport of the future.
1
4
42

どこかで見覚えのある・・・

M5Stack Open Day 2025 has wrapped up successfully! 🎉 M5 Users—developers, DIYers, and educators from 11 countries—gathered at our Shenzhen HQ for behind‑the‑scenes factory tours and inspiring product & project showcases. From the launch of the @Arduino Nesso N1 🚀 to
0
1
7
【速報】NTT、光量子コンピューター実用化へ https://t.co/sGSa9J27HP

47news.jp
NTTは18日、2030年までに創薬や気象予報などの社会課題に取り組める ...
71
2K
7K

明日からJILBY一般には初公開です! ビッグサイトでおまちしております!

【展示会出展】 11月19日(水)~11月21日(金) 東京ビッグサイトで開催 アイリスオーヤマが「ビルメンヒューマンフェア&クリーンEXPO 2025」に出展します! 先日発表した「JILBY」も展示します! お待ちしております 東京ビッグサイト 西展示場3ホール 3-B02 #シンクロボ #JILBY #ビルメンフェア
0
2
13

来週11月18日(火) 19日(水)の2日間、日本科学未来館でガンダムオープンイノベーションの結果報告会が行われます。宇宙世紀実現を目指した最新研究の講演にご興味ある方は、ぜひ登録ください。#V_Sido

🛰️ガンダム×未来技術イベント🌏 『GUNDAM OPEN INNOVATION 2021-2025~ GOI PROJECT REPORT ~』開催決定❗️ 共創パートナーによる展示や講演などを実施するので、どうぞお楽しみに✨ 日時:11月18日、19日 10:00-16:30 場所:日本科学未来館 7階 参加費:無料 ▼イベント詳細
1
24
35
ヒューマノイドの足首において,ロータリがいいか,リニアがいいかの議論してる

Also, if you haven’t watched this episode by Scott @GoingBallistic5, it’s a really good discussion on “What is the Best Design for a Humanoid Ankle?” https://t.co/ooJ1YhvrhG
0
5
18

GOIの面白い所は、我々以外の公認プロジェクトとのコラボが発生しているところです。こちらは、ビーム・サーベル プラズマ農業プロジェクトとのコラボレーションです。プラズマベリーの採取実験。 https://t.co/2gYoSfdiAn
GOI共創パートナーであるチームBALLさん主体のプロジェクトの進捗報告🤖✨ 将来大型ロボットの操縦と実用を目指し、着々と小型ロボットの試作が進んでいます! 動画は小型ロボットによるイチゴの摘み取りの様子を配信🍓 #ガンダムオープンイノベーション #V_Sido
1
3
17
この時期、GFYとのコラボレーションで人が四人乗れる四脚ロボットSR-02(三精テクノロジーズ製)を歩かせたりしており、これもGOIでの取り組みに大きくかかわることになりました。#V_Sido
https://t.co/rrY5juC6H5
1
8
14

第32回KONDO BATTLEのイベント情報を公開しました! https://t.co/Iryr7qDDvP 本日より参加申し込みの受付を開始します! ベテランはもちろん、初めての方のご参加も大歓迎です!KHR、KXRをお持ちの方は、この機会にぜひご参加ください! こちらのイベントは、ROBO-ONE認定大会です。
0
14
31