

Clemens Eppner
@clembow
Followers
177
Following
276
Media
8
Statuses
37
RT @pranav_atreya: In robotics benchmarks are rarely shared. New eval setups are created for each new project, a stark difference from eval….
0
21
0
RT @Adithya_Murali_: Excited to share our latest work on industrial pick-and-place in collaboration with @IntrinsicAI announced at #Automat….
developer.nvidia.com
We are announcing our collaboration with Intrinsic.ai on learning foundation skill models for industrial robotics tasks. Many pick-and-place problems in industrial manufacturing are still completed...
0
2
0

RT @Adithya_Murali_: At @NVIDIAAI research, we have been working on general-purpose robotic rearrangement 🤖. Today, we are announcing CabiN….
0
14
0
RT @Adithya_Murali_: Excited to release Motion Policy Networks! w/ @fishbotics @clembow. If you are at @corl_conf in NZ, checkout Adam’s pr….
0
1
0
RT @Adithya_Murali_: Robotics AI researchers🤖 have you wondered - are we really making progress in robotics? Will we have our own ImageNet….
0
16
0
RT @fishbotics: Annoyed that existing motion generation systems promise the world but leave you with endless parameter tuning? Announcing M….
0
23
0
RT @rhys_newbury: Very excited to share our new review paper on deep learning in grasping, focusing on 6-DoF grasping works. Got to work w….

arxiv.org
Grasping is the process of picking up an object by applying forces and torques at a set of contacts. Recent advances in deep-learning methods have allowed rapid progress in robotic object...
0
6
0

RT @a__mousavian: We have a great lineup of speakers for our #RSS2021 workshop on understanding gaps between academic and industrial applic….
sites.google.com
Advances in machine learning (ML), the design of novel end-effectors and sensors, and the development of intelligent perception, planning and control algorithms have resulted in undeniable progress...
0
1
0
now also shows the most cited publications for each listed conference (based on Google Scholar data; only venues that are at least 6 months old).
0
0
0
RT @a__mousavian: Motion planning methods need 3D model of the scene/voxelization to check for collisions. Inspired by implicit methods, we….
0
16
0
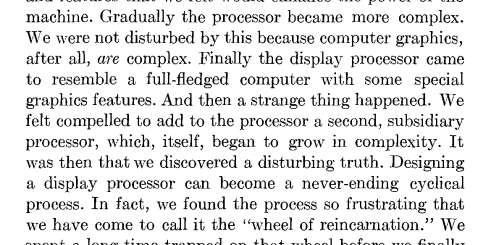
"And then a strange thing happened." The design pitfall known as the "wheel of reincarnation". (from "On the Design of Display Processors" by Myer and Sutherland, 1968.
0
0
1
RT @Adithya_Murali_: Incredibly thrilled that our work on robotic grasping is a Finalist for Best Paper Awards at #ICRA_2020! Looking forwa….
0
21
0