
Abrar Anwar
@_abraranwar
Followers
559
Following
933
Media
23
Statuses
170
CS PhD student at @USCViterbi + intern @nvidia | prev intern @Cornell @SandiaLabs | undergrad @UTCompSci
Austin, TX
Joined August 2013
Robots are deployed for long periods of time, but how can they answer questions and generate goals based on their long-horizon history?. During my internship at #NVIDIA, we built ReMEmbR, a retrieval-augmented memory for embodied robots. 1/8 🧵.
5
30
264
RT @zhiyuan_zhou_: Check it out and submit your 8 page paper by Aug 30! . Thanks to my co organizers @_abraranwar @Jesse_Y_Zhang @jasonxyli….
0
1
0
Great thanks to all the organizers and advisory committee!.@Jesse_Y_Zhang, @zhiyuan_zhou_, @jasonxyliu, @huihan_liu, @jensen_gao, @abhishekunique7, @StefanieTellex, @yukez

0
0
3
We especially welcome early-stage work and position papers focused on scalable and reproducible evaluation practices, as well as approaches for monitoring and ensuring safety during deployment. Robot learning papers with strong evaluation practices would also be appreciated!.
1
0
2
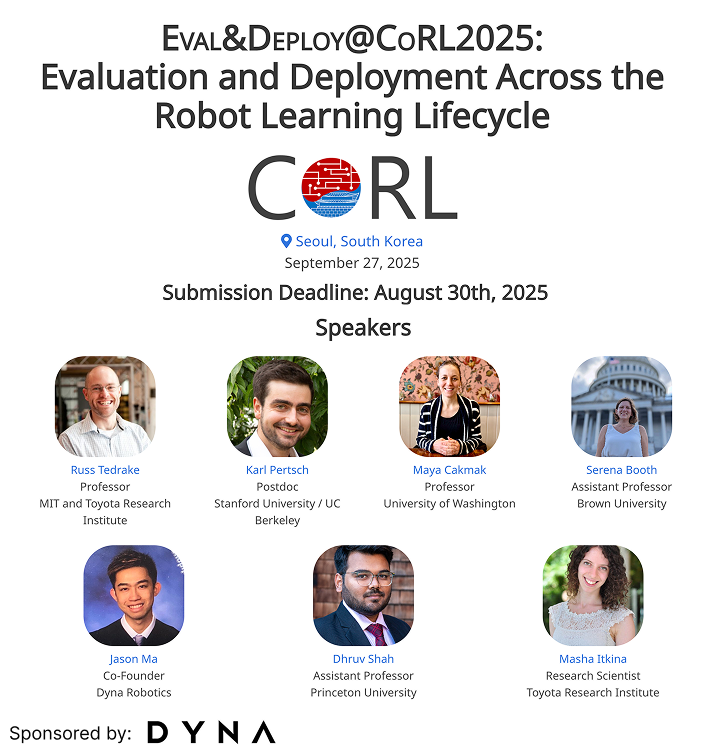
Submit by Aug 30th (up to 8 pages)! More info on our link. We'll have our best paper award sponsored by @DynaRobotics thanks to @JasonMa2020!. We have a great list of speakers! @RussTedrake, @KarlPertsch, @mayacakmak, Serena Booth, @JasonMa2020, @shahdhruv_, @MashaItkina.
1
0
2
Are current eval/deployment practices enough for today’s robot policies?. Announcing the Eval&Deploy workshop at CoRL 2025 @corl_conf, where we'll explore eval + deployment in the robot learning lifecycle and how to improve it!. 🗓️ Submissions due Aug 30
2
6
31
RT @YukiWang_hw: Using OT to define rewards for imitating video demos is popular, but it breaks down when demos are temporally misaligned—a….
0
13
0
RT @haldar_siddhant: Current robot policies often face a tradeoff: they're either precise (but brittle) or generalizable (but imprecise).….
0
75
0
RT @ebiyik_: While some of my students were organizing the human-in-the-loop robot learning workshop at RSS 2025, another group won the bes….
0
3
0
ReWiND won best workshop paper at the OOD workshop at RSS yesterday! Check out our work below!.

In other news, ReWiND won best paper at the OOD workshop at RSS yesterday!.If you haven’t already, check out: .🕸️📑: Or if you’re lazy like me read @Jesse_Y_Zhang’s tweet 😉

2
0
44
RT @SOTA_kke: In other news, ReWiND won best paper at the OOD workshop at RSS yesterday!.If you haven’t already, check out: .🕸️📑: https://t….
0
9
0
RT @shahdhruv_: Yesterday, we live demo-ed a “generalist” VLA for (I think) the first time ever to a broad audience @RoboticsSciSys. Bring….
0
28
0
RT @rkjenamani: Really excited to share that FEAST won the Best Paper Award at #RSS2025!. Huge thanks to everyone who’s shaped this work, f….
0
8
0
RT @jerthesquare_: Robotics data is expensive and slow to collect. Robotics labs and companies spend months just to collect around 10k hou….
0
74
0
I'm glad to have played a small part in some of Rajat's amazing line of work!.

FEAST builds on years of mealtime assistance research I’ve led @EmpriseLab (advisor: @TapoBhat), including:. 🍴 FLAIR for acquiring in-the-wild dishes (w/ @priyasun_, @DorsaSadigh & others).👄 Feel the Bite for inside-mouth bite transfer (w/ @_abraranwar & others). 🧵 7/8
0
0
6
RT @rkjenamani: Most assistive robots live in labs. We want to change that. FEAST enables care recipients to personalize mealtime assistan….
0
68
0
As researchers, we rarely deploy our robots in the wild. Rajat's work does just that, building full-stack robot systems so reliably that he can put assistive robots in people's homes today. Congrats to Rajat and team!.
Most assistive robots live in labs. We want to change that. FEAST enables care recipients to personalize mealtime assistance in-the-wild, with minimal researcher intervention across diverse in-home scenarios. 🏆 Outstanding Paper & Systems Paper Finalist @RoboticsSciSys.🧵1/8
1
1
12
There's been a large focus on how to better collect data for robotics. Nathan's work on embodied interfaces is a cool way to better collect better data from humans! Read more about it in his USC Robotics blog post!.

[Blog Post Announcement] The internet is full of “interesting” data: cat videos, think pieces, and highlight reels—but robots often need to learn from mundane data to help us with everyday unexciting tasks. While people aren’t incentivized to share this boring data, we constantly.
0
0
6
Cool to see more real-world RL! Great job!.

Real-world RL, where robots learn directly from physical interactions, is extremely challenging — especially for high-DoF systems like mobile manipulators. 1⃣ Long-horizon tasks and large action spaces lead to difficult policy optimization. 2⃣ Real-world exploration with
1
0
9
RT @Ishika_S_: VLAs have the potential to generalize over scenes and tasks, but require a ton of data to learn robust policies. We introdu….
0
24
0
RT @jennyzhangzt: **When AIs Start Rewriting Themselves**.Darwin Gödel Machine: Open-Ended Evolution of Self-Improving Agents. The Darwin….
0
55
0