
Sumedh Sontakke
@SOTA_kke
Followers
715
Following
3K
Media
31
Statuses
327
Robotics Scientist at @Amazon. PhD CS from @CSatUSC. RTs are my own paper reading list. Previously at @MSFTResearch and @GoogleDeepMind
Joined July 2020
I recently moved to the Frontier AI and Robotics (FAR) team at Amazon led by @peterxichen @rocky_duan and @pabbeel (I will be based out of SF) where I will focus on general purpose robot manipulation! . 1. Who should I meet?.2. What should I eat/drink?.3. Where should I go?

9
3
124
RT @RchalYang: How can we leverage diverse human videos to improve robot manipulation?. Excited to introduce EgoVLA — a Vision-Language-Act….
0
74
0
In other news, ReWiND won best paper at the OOD workshop at RSS yesterday!.If you haven’t already, check out: .🕸️📑: Or if you’re lazy like me read @Jesse_Y_Zhang’s tweet 😉


Reward models that help real robots learn new tasks—no new demos needed!. ReWiND uses language-guided rewards to train bimanual arms on OOD tasks in 1 hour!. Offline-to-online, lang-conditioned, visual RL on action-chunked transformers. 🧵
2
10
59
The effectiveness/robustness of a combination of learned + traditional methods surprised me. Do we need end-to-end image to action policies?.
0
0
3
We demo’d Amazon grasp model at RSS this year. We performed over 600 grasps over one day at roughly 80-90% SR.1. On an open item set (people gave random often adversarial items),.2. In a random scene fully outdoor throughout the day.3. On a new embodiment (different from



2
7
68
I am so grateful to our amazing leadership at Amazon Robotics for allowing us to chase difficult scientific questions and to my amazing colleagues who make work, play! Reach out if you are interested in joining our absolutely stacked team! Read more:

arxiv.org
This work demonstrates how autonomously learning aspects of robotic operation from sparsely-labeled, real-world data of deployed, engineered solutions at industrial scale can provide with...
0
1
1
This is an extremely challenging setup - unknown scene, items and env conditions! We are so excited to show you what GenGrasp can (and cannot) do. We will visualize grasps generated, debug live failures and provide high signal insights 😉 about our robot learning efforts.
1
0
0
Here's a video of GenGrasp's zero-shot capabilities. The (1) robot embodiment, (2) the physical scene layout and (3) objects being were all *unseen* during training. We just rolled our robot over, calibrated cams and inferred with GenGrasp.
1
0
1
We pretrain GenGrasp on grasping datasets like ArmBench and find that GenGrasp can generalize across a variety of scenes, from totes and conveyor belts in our warehouses to random unseen locations like this tabletop.

1
0
0
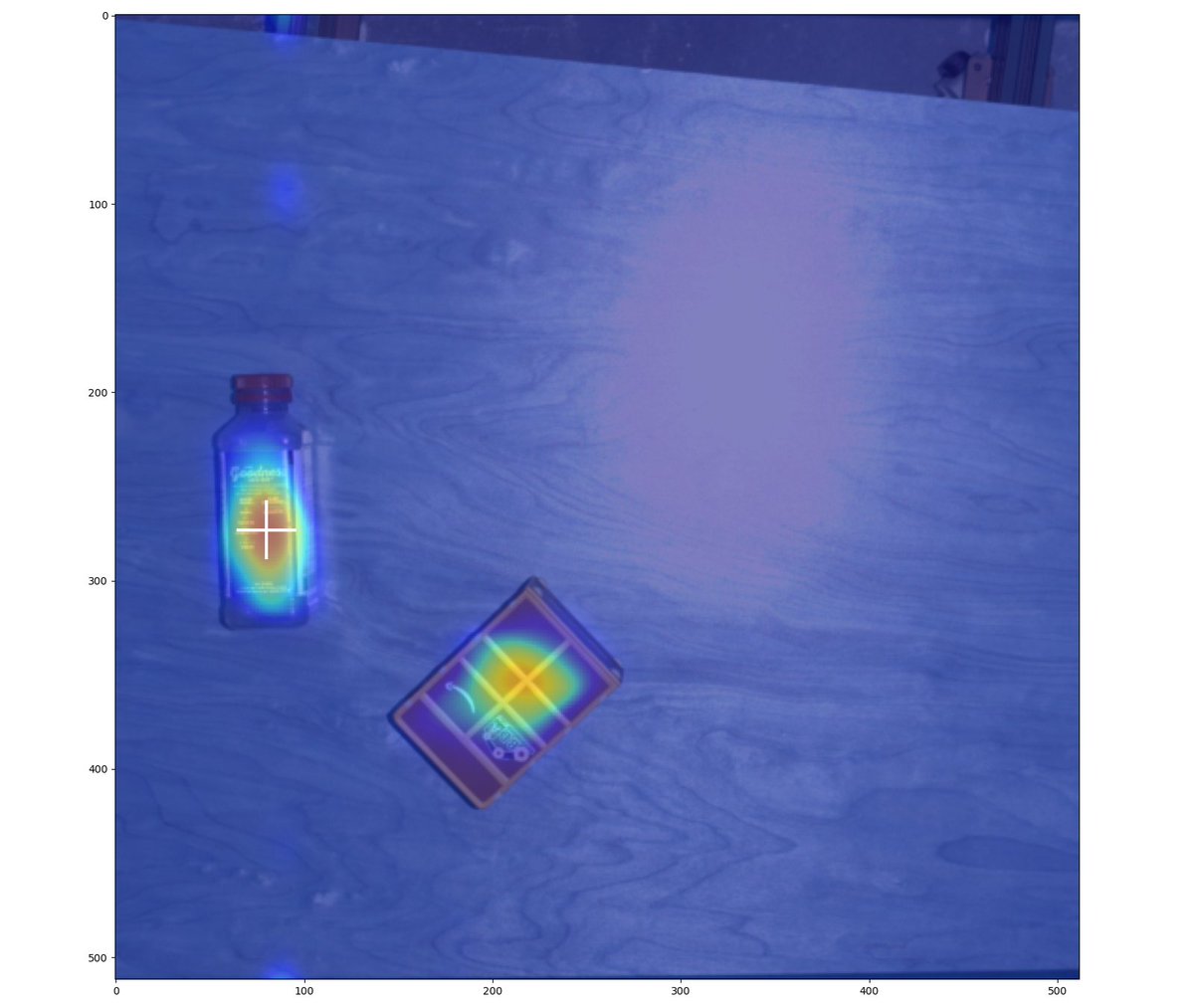
At RSS, we will present a core component of this tech - our Generative Grasping (GenGrasp) model which provides embodiment-agnostic grasp affordances. Given a scene and a pixel prompt pick location, GenGrasp generates grasp scores that indicate pick success likelihood.
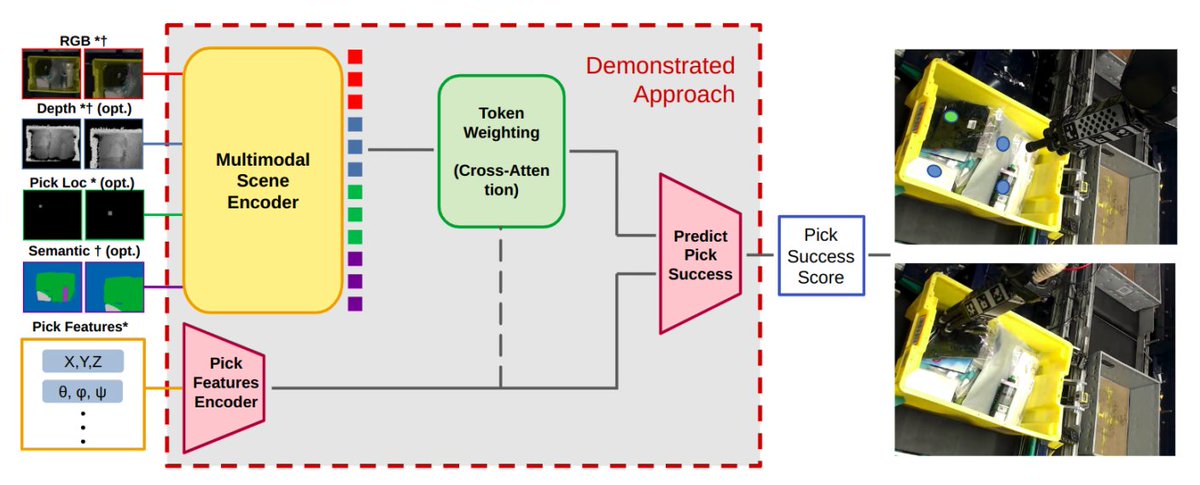
1
0
1
🚨 RSS Demo Paper Alert!.Amazon needs to manipulate millions of items daily—demanding robust policies that handle (1) diverse objects in cluttered warehouses, (2) adapt across robotic embodiments, and (3) deliver high performance across thousands of sites with varying layouts.
2
10
52
RT @chenouttaten: 2 Days, 10 teams, and an army of robots. You guys drove hours, battled LA heat, and squashed countless bugs. The result…….
0
10
0
Stopped by the LeRobot Hackathon in LA today, met old friends and made some new ones!.Come say hi 👋


2
7
53
RT @Ishika_S_: VLAs have the potential to generalize over scenes and tasks, but require a ton of data to learn robust policies. We introdu….
0
28
0