
Jason Liu
@JasonJZLiu
Followers
2K
Following
1K
Media
16
Statuses
218
PhD Student @CMU_Robotics | Prev: Robot Learning @NvidiaAI | Engineering Science @UofT
USA
Joined September 2014
Low-cost teleop systems have democratized robot data collection, but they lack any force feedback, making it challenging to teleoperate contact-rich tasks. Many robot arms provide force information — a critical yet underutilized modality in robot learning. We introduce:.1. 🦾A
27
86
800
RT @ZhiSu22: 🏓🤖 Our humanoid robot can now rally over 100 consecutive shots against a human in real table tennis — fully autonomous, sub-se….
0
540
0
RT @AIatMeta: Introducing DINOv3: a state-of-the-art computer vision model trained with self-supervised learning (SSL) that produces powerf….
0
756
0
RT @lchen915: Self-Questioning Language Models: LLMs that learn to generate their own questions and answers via asymmetric self-play RL. T….
0
183
0
RT @SkildAI: We’ve all seen humanoid robots doing backflips and dance routines for years. But if you ask them to climb a few stairs in the….
0
144
0
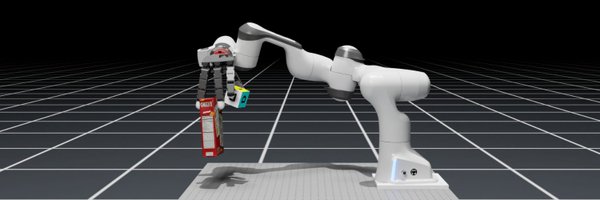
RT @redstone_hong: 🤖 Initial code release is up for VideoMimic Real2Sim!. VideoMimic is a real-to-sim-to-real pipe….
github.com
Visual Imitation Enables Contextual Humanoid Control. arXiV, 2025. - hongsukchoi/VideoMimic
0
35
0
RT @brenthyi: July has been a big month for Viser!.- Released v1.0.0😊.- We did some writing. Some demos👇
0
101
0
RT @davidrmcall: Excited to share Flow Matching Policy Gradients: expressive RL policies trained from rewards using flow matching. It’s an….
0
200
0
RT @kenny__shaw: LEAP Hand now supports Isaac Lab! (adding to Gym, Mujoco, Pybullet) This 1-axis reorientation uses purely the propriocept….
0
23
0
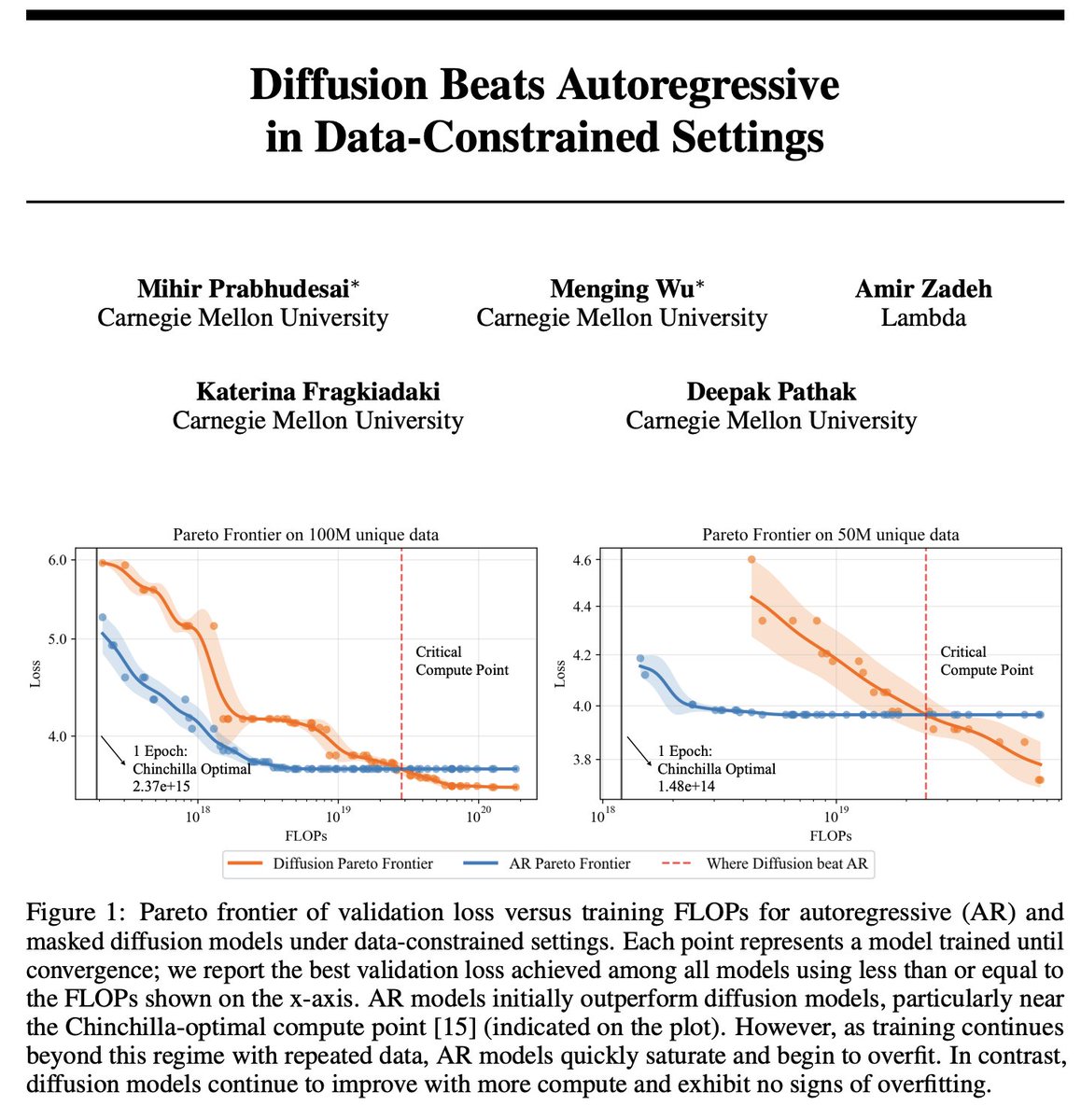
Excellent insights on when to use autoregressive vs diffusion models.

🚨 The era of infinite internet data is ending, So we ask:. 👉 What’s the right generative modelling objective when data—not compute—is the bottleneck?. TL;DR:. ▶️Compute-constrained? Train Autoregressive models. ▶️Data-constrained? Train Diffusion models. Get ready for 🤿 1/n
0
2
18
RT @mihirp98: 🚨 The era of infinite internet data is ending, So we ask:. 👉 What’s the right generative modelling objective when data—not co….
0
192
0
RT @robot_trainer: The Dex team at NVIDIA is defining the bleeding edge of sim2real dexterity. Take a look below 🧵 There's a lot happening….
0
50
0
RT @_tonytao_: Want to add diverse, high-quality data to your robot policy?. Happy to share that the DexWild Dataset is now fully public, h….
0
9
0
RT @TheHumanoidHub: Got to visit the Robotics Institute at CMU today. The institute has a long legacy of pioneering research and pushing t….
0
21
0
RT @mihirp98: 1/ Maximizing confidence indeed improves reasoning. We worked with @ShashwatGoel7, @nikhilchandak29 @AmyPrb for the past 3 we….
0
13
0
Neat idea!.

Presenting DemoDiffusion: An extremely simple approach enabling a pre-trained 'generalist' diffusion policy to follow a human-demonstration for a novel task during inference. One-shot human imitation *without* requiring any paired human-robot data or online RL 🙂. 1/n
0
0
6
RT @kevin_zakka: We’re super thrilled to have received the Outstanding Demo Paper Award for MuJoCo Playground at RSS 2025!.Huge thanks to e….
0
21
0
RT @jianglong_ye: How to generate billion-scale manipulation demonstrations easily? Let us leverage generative models! 🤖✨. We introduce Dex….
0
89
0
Presenting FACTR today at #RSS2025 in the Imitation Learning I session at 5:30pm (June 22). Come by if you're interested in force-feedback teleop and policy learning!.
Low-cost teleop systems have democratized robot data collection, but they lack any force feedback, making it challenging to teleoperate contact-rich tasks. Many robot arms provide force information — a critical yet underutilized modality in robot learning. We introduce:.1. 🦾A
2
13
84
RT @_tonytao_: Thrilled to have received Best Paper Award at the EgoAct Workshop at RSS 2025! 🏆. We’ll also be giving a talk at the Imitati….
0
9
0