
Xiaoyu (Haytham) Huang
@x_h_ucb
Followers
244
Following
1
Media
6
Statuses
21
Ph.D. student @ UC Berkeley. Interested in learning-based locomotion/loco-manipulation.
Berkeley, CA
Joined September 2024

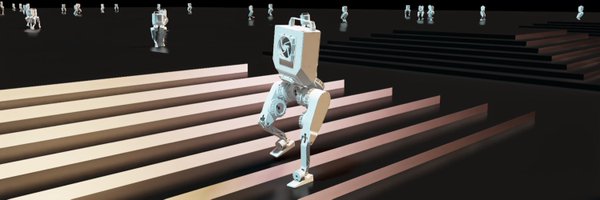
Humanoid motion tracking performance is greatly determined by retargeting quality! Introducing 𝗢𝗺𝗻𝗶𝗥𝗲𝘁𝗮𝗿𝗴𝗲𝘁🎯, generating high-quality interaction-preserving data from human motions for learning complex humanoid skills with 𝗺𝗶𝗻𝗶𝗺𝗮𝗹 RL: - 5 rewards, - 4 DR
31
156
673
Really impressive work! Especially from an undergrad in under 3 months! Zhi is also applying for PhD this year!

🏓🤖 Our humanoid robot can now rally over 100 consecutive shots against a human in real table tennis — fully autonomous, sub-second reaction, human-like strikes.
0
0
16
The most interesting thing we learn is that adding basic domain randomization is already enough for dynamic motion tracking! Details in the preprint tech report.

Want to achieve extreme performance in motion tracking—and go beyond it? Our preprint tech report is now online, with open-source code available!
0
0
22
Want to achieve extreme performance in motion tracking—and go beyond it? Our preprint tech report is now online, with open-source code available!
34
240
1K

Researchers from RAI Institute present Diffuse-CLoC, a new control policy that fuses kinematic motion diffusion models with physics-based control to produce motions that are both physically realistic and precisely controllable. This breakthrough moves us closer to developing
2
39
173
DiffuseCLoC is a leap toward foundation control policies for high-DOF characters and humanoid robots. 🔗 More demos and paper: https://t.co/PYWYywWSkJ 💡 Internship project at @rai_inst 🎤 Catch our talk at SIGGRAPH 2025! #SIGGRAPH2025 #Humanoid #Animation #Robotics
diffusecloc.github.io
A guided diffusion framework enabling steerable and physically realistic motion generation for character control.
2
1
4
🧗♂️ And yes... parkour. Because guided diffusion doesn’t just generalize — it moves with agility, dynamics, and style.
1
0
5
✨ Need your character to hit a few key poses? Just inpaint those desired states into the prediction horizon — DiffuseCLoC fills in the motion seamlessly, even if it's never seen those keypoints before. Perfect for animation, editing, or planning.
1
0
3
🎮 Plug in a joystick — and you’re in control. With just an L2 cost on velocity + height, DiffuseCLoC delivers responsive interactive control for navigation and motion. Furthermore, it runs in real-time!
1
0
4
🧭 Want to avoid obstacles on the fly? Just define a cost function. Using simple SDF + L2 costs, DiffuseCLoC dodges other characters and pillars with smooth, lifelike agility — zero retraining.
1
0
4
🤖 End-to-end. Predictive. Powerful. DiffuseCLoC directly predicts future states and motor PD targets — then optimizes them to hit any goal at test time. 💡This turns learning-based control into optimization during inference — a new paradigm for motion intelligence.
1
0
11
🔥 Proud to present our SIGGRAPH 2025 Journal paper — DiffuseCLoC: Guided Diffusion for Physics-Based Character Look-Ahead Control🚀 A single, generalist control policy that solves diverse tasks at test-time, no fine-tuning needed. 🎥 Proj Page: https://t.co/MQ85X5Li7N 🧵Thread👇
6
30
164
With high-fidelity simulation and ray-tracing rendering, we can minimize the sim-to-real gap and achieve zero-shot sim-to-real transfer! We hope this is a critical step for scaling humanoid-specific data that is scarce atm.

🚀 Introducing LeVERB, the first 𝗹𝗮𝘁𝗲𝗻𝘁 𝘄𝗵𝗼𝗹𝗲-𝗯𝗼𝗱𝘆 𝗵𝘂𝗺𝗮𝗻𝗼𝗶𝗱 𝗩𝗟𝗔 (upper- & lower-body), trained on sim data and zero-shot deployed. Addressing interactive tasks: navigation, sitting, locomotion with verbal instruction. 🧵 https://t.co/LagyYCobiD
0
1
5
🚀 Introducing LeVERB, the first 𝗹𝗮𝘁𝗲𝗻𝘁 𝘄𝗵𝗼𝗹𝗲-𝗯𝗼𝗱𝘆 𝗵𝘂𝗺𝗮𝗻𝗼𝗶𝗱 𝗩𝗟𝗔 (upper- & lower-body), trained on sim data and zero-shot deployed. Addressing interactive tasks: navigation, sitting, locomotion with verbal instruction. 🧵 https://t.co/LagyYCobiD
13
112
463
Just presented DiffuseLoco at #CoRL2024! DiffuseLoco learns diverse, multimodal skills for legged robots purely from offline datasets with a 6.8M transformer DDPM (YES it runs onboard at 30Hz!) A step towards large-scale learning for control. Code & ckpts👉 https://t.co/CqX0EDjvHk
1
21
112

Kudos to @ZhiSu22 @x_h_ucb for our #IROS24 paper exploiting morphological symmetries in model-free RL locomotion/ manipulation.
Exploiting morphological symmetries can enhance model-free RL sample efficiency, policy optimality, and sim2real transfer in legged locomotion and manipulation. Our #IROS2024 paper exploits these symmetries for RL methods. Code is open-sourced: 🌐 https://t.co/1I2TMl0sfW🧵
1
3
6
Exploiting morphological symmetries can enhance model-free RL sample efficiency, policy optimality, and sim2real transfer in legged locomotion and manipulation. Our #IROS2024 paper exploits these symmetries for RL methods. Code is open-sourced: 🌐 https://t.co/1I2TMl0sfW🧵
1
8
28
Introducing HiLMa-Res: a hierarchical RL framework for quadrupeds to tackle loco-manipulation tasks with sustained mobility! Designed for general learning tasks (vision-based, state-based, real-world data, etc), the robot now can step over stones🐾/navigate boxes📦/dribble⚽.
4
23
125