
USC RESL
@uscresl
Followers
328
Following
23
Media
36
Statuses
93
Robotic Embedded Systems Laboratory @USC
Los Angeles, CA
Joined June 2009

Blog post: Project website: Paper: Code: Authors: @arthur801031, @SichengHe12345, @daniel_t_seita, @gauravsukhatme. End thread🧵.
github.com
VoxAct-B: Voxel-Based Acting and Stabilizing Policy for Bimanual Manipulation (CoRL 2024) - VoxAct-B/voxactb
0
1
1
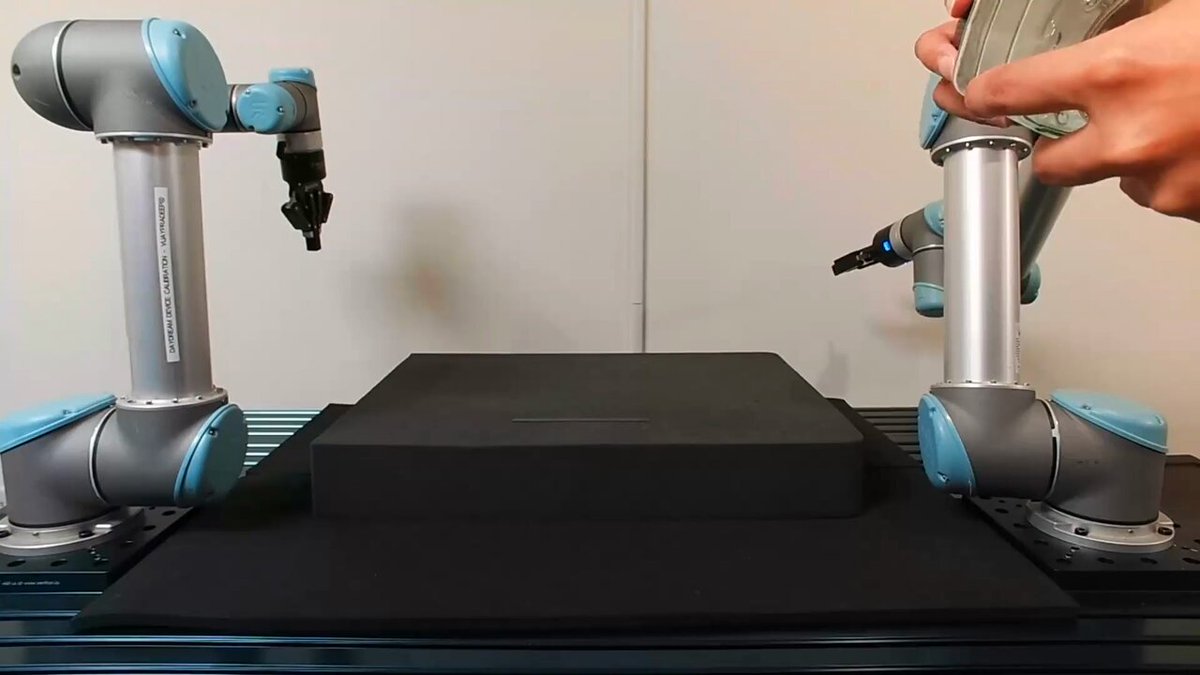
Right-acting, left-stabilizing evaluation rollouts from VoxAct-B. 9/N
1
0
0
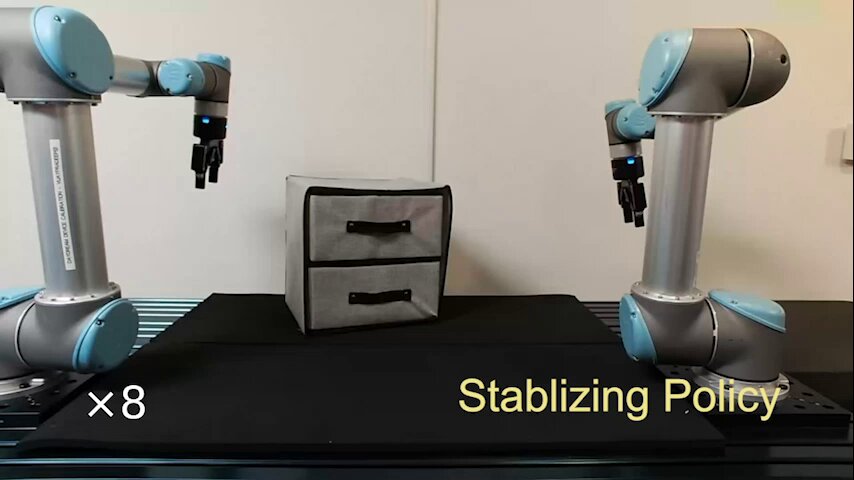
Left-acting, right-stabilizing evaluation rollouts from VoxAct-B. 8/N
1
0
0
We compare against several strong baseline methods: ACT, Diffusion Policy, and VoxPoser. Each method is trained on 10 or 100 demonstrations, with one arm stabilizing and the other arm manipulating the object. 7/N

1
0
0
For bimanual manipulation policies, we exploit the discretized action space that predicts the next best voxel by formulating a system that uses acting and stabilizing policies, enabling more efficient learning from multi-modal demos compared to a joint-space control policy. 6/N

1
0
0
We use the object’s position with RGB-D images to reconstruct a voxel grid based on hyperparameter α that determines the size of the crop, allowing us to zoom into the more important region of interest. 👇Effects of α on the voxel resolution with the same number of voxels. 5/N

1
0
0
The Vision Language Models (VLMs) output the segmentation mask of the object. We use its centroid along with point cloud data to retrieve the object’s pose. This is used to determine the task-specific roles of each arm and the language goal. 👇 VLMs pipeline. 4/N

1
0
0
In this work (VoxAct-B), we retain the spatial equivariance benefits of voxel representations but reduce the cost of processing voxels by “zooming” into part of the voxel grid. It takes RGB-D images, two language goals, and proprioception data of two robot arms as input. 3/N

1
0
0
Voxel representations, when coupled with discretized action spaces, can increase sample efficiency and generalization by introducing spatial equivariance into a learned system; however, processing them is computationally expensive. 2/N

1
0
0
Tasks requiring two-hand coordination and fine-grained manipulation remain challenging for current robotic systems. Our CoRL 2024 paper proposes a sample-efficient, language-conditioned, voxel-based method that utilizes Vision Language Models to address these challenges. 🧵👇
1
6
51
Collision Avoidance and Navigation for a Quadrotor Swarm Using End-to-end Deep Reinforcement Learning.site: arxiv: A thread🧵, 5/5.
sites.google.com
Abstract
0
0
2
Conditionally Combining Robot Skills using Large Language Models.code: arxiv: A thread🧵, 4/5.

github.com
Contribute to krzentner/language-world development by creating an account on GitHub.
1
0
2
CppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning.site: arxiv: A thread🧵, 3/5.
1
0
1
HyperPPO: A scalable method for finding small policies for robotic control.site: arxiv: A thread🧵, 2/5.
1
0
3
RESL shall be presenting 4 papers at #ICRA2024! Congratulation to all the authors! .Presenters: @hegde_shashank, @Zhehui_Huang @JeremySMorgan3, @krzentner, @gauravsukhatme!. @ieee_ras_icra @CSatUSC @USCViterbi @USCMingHsiehEE . A thread🧵, 1/5

1
8
26
Checkout our poster at CoRL, presented by @arthur801031 @GautamSalhotra on Tue Nov 7!.Website, code, videos: PDF: @gauravsukhatme @CSatUSC . End thread🧵, 9/9.
0
1
3
Of course, 2 picker to 1 picker is not the only cross morphology enabled by MAIL. Here we show instances of 3-to-2, 2-to-1, 3-to-1 transfer on a toy rearrangement task. This could be extendible to n-to-m pickers in general. 8/9
1
0
0