
@ankurhandos
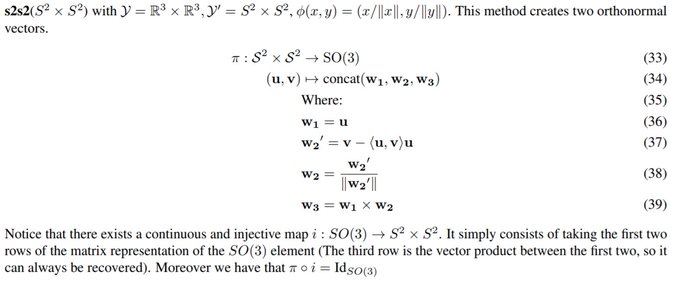
Interesting paper on manifold valued regression. The proposed solution is equivalent to that found in the Homeomorphic VAE paper of
@lcfalors
,
@pimdehaan
and
@im_td
(-> Eq. 33)
4
4
24
Replies

Quaternions and Euler angles are discontinuous and difficult for neural networks to learn. They show 3D rotations have continuous representations in 5D and 6D, which are more suitable for learning.
i.e. regress two vectors and apply Graham-Schmidt (GS).

13
145
646
0
0
1

@maurice_weiler
@ankurhandos
@lcfalors
@pimdehaan
@im_td
The map I: : S^2 \times S^2 --> SO(3) is not continuous: it has a singularity (and is not properly.defined) on the diagonal {(v, v)} and the anti diagonal {(v, -v)}.
1
0
1
@RogierBrussee
@ankurhandos
@lcfalors
@pimdehaan
@im_td
This is true. But the restriction of pi to the image of i should be fine?
1
0
1

@maurice_weiler
@ankurhandos
@lcfalors
@pimdehaan
@im_td
could these ideas be extended to dimension higher than three? It seems that the construction of the orthornomal basis {w_1, w_2,w_3} is very specific to d=3. What am I missing?
1
0
0
@SaraASolla
@ankurhandos
@lcfalors
@pimdehaan
@im_td
yes, the same idea is in principle easily applicable to SO(N): You predict N-1 (linearly independent) vectors in R^N and orthonormalize them. Then you add the unique N-th vector such that you get a right handed orthonormal frame which corresponds to a group element of SO(N).
2
0
2

@maurice_weiler
@ankurhandos
@lcfalors
@pimdehaan
@im_td
Wow cool read! Homeomorphisms and VAEs? Sign me up
0
0
1