

Alberta Longhini
@longhini_a
Followers
65
Following
14
Media
4
Statuses
10
PhD student @kth_rpl | Research intern @naverlabseurope | Previous visiting researcher @CMU_Robotics.
Joined December 2014
RT @ZadaianchukML: 🚀 We’re excited to announce our #CoRL2025 workshop: Learning to Simulate Robot Worlds.Spanning high-fidelity simulators,….
0
11
0
RT @DavidBMulero: Attending #RSS2025? Interested in co-design or deformable object manipulation?.Kei Ikemura will present our joint work "E….
0
1
0
Honored to be selected for #RSSPioneer2025 at RSS this year. Thanks to the organizers for making this possible. I’m excited for the chance to have insightful discussions and exchange ideas — feel free to reach out if you’d like to connect!.

List of 33 #RSSPioneer2025 is out! Their research interests cover fundamental robot design, modelling and control, robot perception and learning, localisation and mapping, human-robot interaction, healthcare and medical robotics, and soft robots! .

0
0
7
RT @wenlong_huang: Excited to announce the “Structured World Models for Robotic Manipulation” workshop at #RSS2025 in LA!. Website: https:/….
0
14
0
Amazing collab with Marcel Büsching, @BDuisterhof, Jens Lundell, @jeff_ichnowski, @Celebrandil, @DanicaKragic.
0
0
1
Cloth-splatting improves tracking accuracy under severe occlusions with respect to other tracking baselines. 4/5
1
0
3
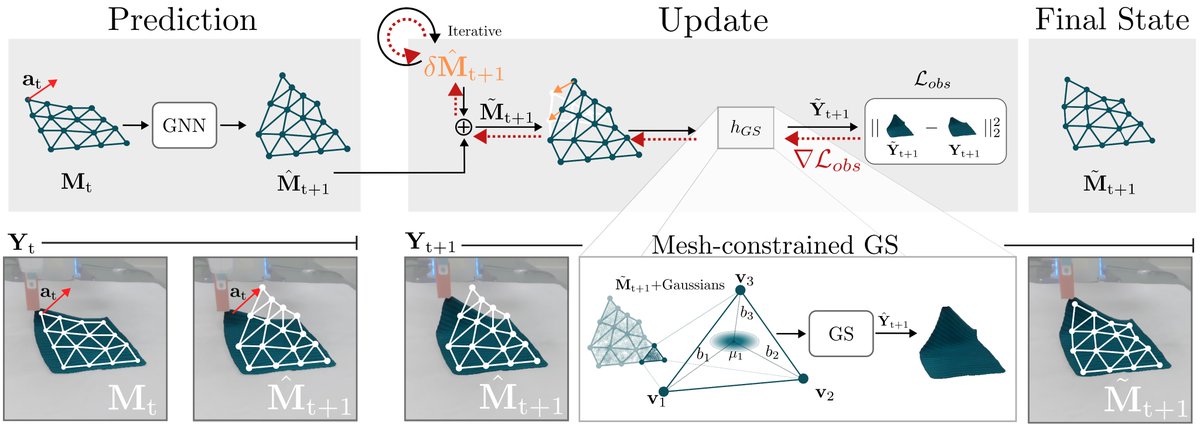
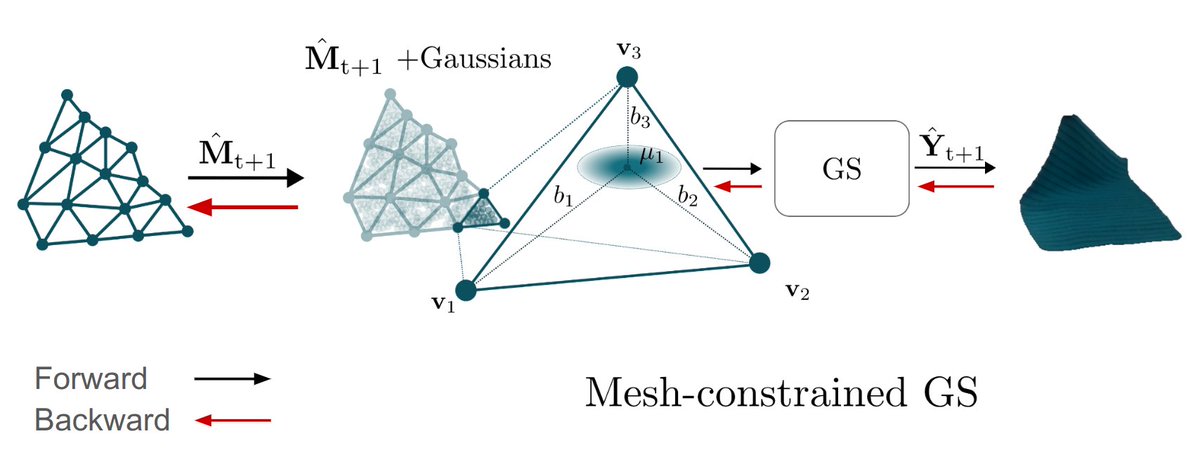
This differentiable map allows the optimization of 3D representations from RGB supervision using a prediction-update framework. 3/5
1
0
2
Coupling 3D meshes with 3DGS enables the definition of a differentiable map between 3-D representations and image observations. 2/5
1
0
3
3D cloth state estimation from RGB images has been a long-standing challenge in robotics. Cloth-Splatting #CoRL2024 combines 3D Gaussian Splatting (3DGS) with an action-conditioned dynamics model to estimate mesh-based 3D representations from RGB observations. 1/5
4
20
125