

David Blanco-Mulero
@DavidBMulero
Followers
188
Following
1K
Media
39
Statuses
222
Postdoc @IRI_robotics | PhD @AaltoUniversity | Learning for robotic manipulation, reinforcement learning and deformable objects.
Barcelona, Spain
Joined June 2019
If you're interested in robotic manipulation, learning dynamics models, reinforcement learning, deformable objects, or simulation engines, my PhD dissertation is now publicly available:.
1
0
5
Check out the different use cases that we are working on the SoftEnable project. If you're interested in deformable object manipulation or robotics for healthcare check it out!.

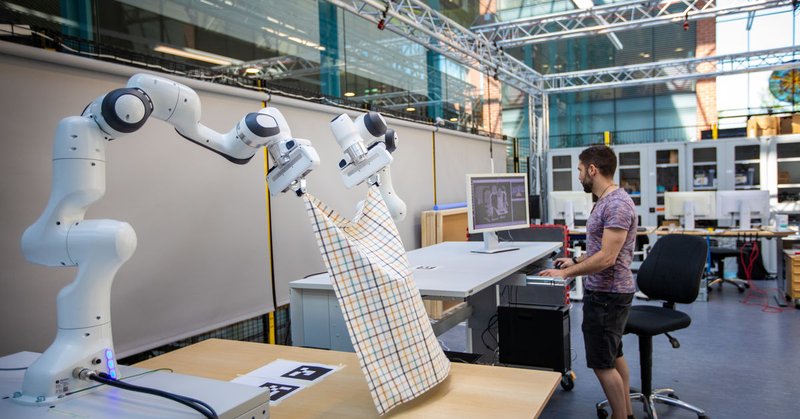
How can robots safely handle soft, delicate materials like fresh fish or medical garments?.📽️Watch our new video and discover how we’re combining cutting-edge research and real-world testing to shape the future of safe robotic manipulation. #robotics #automation #HorizonEurope
0
0
3
This was a joint work with @ftpokorny @YifeiDong314159 @longhini_a and Li Chen, supported by the EU project @softenable.
0
0
1
Attending #RSS2025? Interested in co-design or deformable object manipulation?.Kei Ikemura will present our joint work "Efficient End-Effector Co-Design by Demonstration for Deformable Fragile Object Manipulation" at the Hardware Intelligence Workshop. Feel free to talk to Kei!

1
1
7
As member of @softenable today I had the chance to visit and witness the incredible work of nurses and doctors, and how they benefit from robots to assist them on surgeries. Huge thanks to the @hospitalclinic for hosting us!.
Today @IRI_robotics roboticists are visiting @hospitalclinic operating room, ICU and hospitalization ward to get some insights of the real life applications for @softenable



0
0
1
I'm happy to announce that we just got our certificates for the @IEEE Finland CSS/RAS/SMCS Joint Chapter Best Paper Award 2022! Huge thanks to all collaborators @VKyrki @GokhanAlcan_ and specially to @HietalaJulius who led this work!.Check the project:.

0
0
1
RT @IRI_robotics: 🤝 The @softenable consortium meeting takes place at @IRI_robotics . For two days, partners share the latest updates of th….
0
5
0
#ICRA40 was an amazing opportunity to get insights about the past and future of robotics from some of the best roboticists in the world, have a conversation with them and create new collaborations. Huge thanks to the organizers for arranging such encouraging conference!


0
0
4
Our code and dataset for benchmarking the sim2real gap in cloth manipulation are finally out!.Code: Dataset: We also provide a docker for SOFA with Python 3, if you've never tried it out, check our environment!.
zenodo.org
This dataset is supplemental to the paper "Benchmarking the Sim-to-Real Gap in Cloth Manipulation". D. Blanco-Mulero, O. Barbany, G. Alcan, A. Colomé, C. Torras and V. Kyrki, "Benchmarking the...
Interested in deformable objects, cloth manipulation or simulation engines?.We have evaluated the Sim-to-Real gap in @GoogleDeepMind MuJoCo, Bullet, @nvidia Flex and @SofaFramework SOFA on dynamic and quasi-static cloth manipulation!. Do you want to know more? Scroll down! 🧵
0
0
3
I'll be presenting our work on benchmarking cloth manipulation in MuJoCo, SOFA, Bullet and Nvidia Flex at @ieee_ras_icra #ICRA40 on Tuesday. If you're attending next week, let's have a chat! I'm always eager to new collaborations!.
Interested in deformable objects, cloth manipulation or simulation engines?.We have evaluated the Sim-to-Real gap in @GoogleDeepMind MuJoCo, Bullet, @nvidia Flex and @SofaFramework SOFA on dynamic and quasi-static cloth manipulation!. Do you want to know more? Scroll down! 🧵
0
2
38
RT @IRI_robotics: 📢 Master thesis Call:. 'Accelerating Caging Analysis via Optimal Transport'. ➡️ 👤 Supervisors: D….
0
1
0
Really great to get to know all the other partners of @softenable and share ideas with them!.If you didn't know about SoftEnable and you're interested in deformable object manipulation check out the project!.

0
0
3

Great news! I defended my PhD thesis yesterday 🎉🎉.Huge thanks to the opponent Professor @YiannisDemiris, and to my supervisor Professor @VKyrki

2
0
11
I'm almost done with my PhD! I will defend my PhD thesis "Towards Efficient Robotic Manipulation of Deformable Objects by Learning Dynamics Models and Adaptive Policies" on April 19th.
aalto.fi
Towards Efficient Robotic Manipulation of Deformable Objects by Learning Dynamics Models and Adaptive Policies (title of the thesis)
1
0
4
Happy to receive the honorary mention in the @AaltoUniversity Open Science Award for our research done on Robotic Manipulation of deformable objects!.Thanks to my collaborators @trannguyenle95 @GokhanAlcan_ and @VKyrki !. Here the news article:.
aalto.fi
We interviewed the Intelligent Robotics Research Group with the Robotic Manipulation of Deformable Objects project, 3rd place awardees of the first Aalto Open Science Award.
0
3
9
RT @oriolbarbany: An appealing solution to tackle data scarcity in 🤖 learning is realying on simulators. But how good are they?.Huge effort….

arxiv.org
Realistic physics engines play a crucial role for learning to manipulate deformable objects such as garments in simulation. By doing so, researchers can circumvent challenges such as sensing the...
0
2
0
RT @anointedninja: @DavidBMulero @GoogleDeepMind @nvidia @SofaFramework This is quite amazing. I love works like this because they are supe….
0
1
0
Special thanks to my collaborators @oriolbarbany @GokhanAlcan_ @AdriaColome @CarmeTorras_ROB and @VKyrki ! @AaltoUniversity @IRI_robotics.
0
0
3