
Carlo Sferrazza
@carlo_sferrazza
Followers
2K
Following
536
Media
53
Statuses
299
Incoming Assistant Professor at @UTAustin. RS at @amazon FAR. Postdoc @berkeley_ai. PhD @eth_en. Robotics, Artificial Intelligence, Humanoids, Tactile Sensing.
Joined November 2022
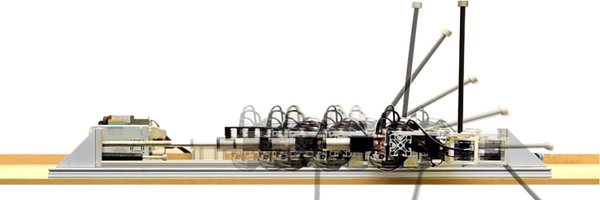
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
19
129
580

tyro 1.0 is out 🐣 This has been a pet project/niche interest of mine for ~4 years now, so it's a bit of a sentimental moment... https://t.co/bAibP3RjxE
github.com
CLI interfaces & config objects, from types. Contribute to brentyi/tyro development by creating an account on GitHub.
10
21
169

I just re-implemented FastTD3 and FastSAC in PyTorch and added a fully jitted JAX version. Feel free to check them out: https://t.co/0D1OY8t297 They work great, especially FastSAC gets me similar performance as PPO in my own locomotion envs. Excited for large scale off-policy RL!
github.com
A framework for Reinforcement Learning research. Contribute to nico-bohlinger/RL-X development by creating an account on GitHub.
4
18
139
Interested in scaling Q-learning to billion parameter models and many tasks?🔥 Join us tomorrow in Exhibit Hall C,D,E #305 (4:30-7:30)! @pabbeel @aviral_kumar2 @marek_a_cygan @carlo_sferrazza
Multi-task RL can be highly sample-efficient and when done right, it unlocks LLM-style transfer and fine-tuning. We’re excited to introduce BRC, a simple recipe for multi-task RL that outperforms SOTA single-task agents while using less compute (!)
1
3
25
All our best results in Holosoma were obtained with FastSAC. We wrote a technical report detailing the key ingredients needed to scale off-policy RL -- both SAC and TD3 -- to massively parallel GPU simulation. Full-fledged humanoid locomotion in 15 minutes, whole-body tracking
Tired of waiting hours for humanoids to learn to walk? Our new technical report shows how to train sim-to-real humanoid locomotion in 15 minutes with FastSAC and FastTD3! The full pipeline is open-source in the newly released Holosoma codebase. Thread 🧵
3
13
96
We also launched a Discord server for all Holosoma-related questions and discussion. Join us here:
discord.com
Software for training whole body robotics | 79 members
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
0
0
7

Very excited to introduce Holosoma, a full-stack fully open-sourced codebase for humanoid sim2real learning: • Manager-based, easy for extension (we provided a quadruped example) • Multiple simulators (Isaac Gym, Isaac Sim, MuJoCo Warp) • Multiple RL algs with minimal
github.com
Contribute to amazon-far/holosoma development by creating an account on GitHub.
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
7
14
110

Excited to share this latest work from our team! Holosoma is now our go-to option for humanoid research at FAR, and we will continue to maintain it and add new capabilities in the future. We're also hiring! Research: https://t.co/Aq4wt6lpKK Software:

amazon.jobs
We are seeking a Simulation Engineer to join our AI robotics research team developing foundation models for robotics. You will rapidly develop 3D physics-based simulation frameworks and tools...
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
0
11
73

Open source for the future. Having one training codebase that supports multiple simulators is a huge win and I'm looking forward to giving this a look
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
0
3
32
Introducing Holosoma (Greek for “whole body”): an easy-to-use and unified control stack that runs across humanoids (G1, T1), quadrupeds (Go2), multiple simulators (MuJoCo, MJLab, IsaacGym/Sim), any terrain, and tasks from velocity control to full-body tracking
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
1
8
68

Don't think I've seen a humanoid robot move that smoothly before.
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
0
2
20
Excited to release Holosoma, our new full-stack, open-source humanoid learning library from Amazon FAR! This has been a huge deal for me -- It enables an incredibly fast research cycle. I'm now able to train and deploy a new policy on real hardware in just 20 minutes with an RTX
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
2
12
103

Open-source: complete codebase covering multiple simulation backends, training, retargeting, and real-world inference. Infra built for humanoid, but also readily modified for quadruped (also included). Lots of infra gems/conveniences we rely on consistently. Hopefully equally
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
10
55
468
Excited to see the release of Holosoma, a full-stack humanoid codebase, covering many SoTA features! More great features coming soon :)
Sim-to-real learning for humanoid robots is a full-stack problem. Today, Amazon FAR is releasing a full-stack solution: Holosoma. To accelerate research, we are open-sourcing a complete codebase covering multiple simulation backends, training, retargeting, and real-world
0
1
7
All of this is open-source, and you can get started now at: https://t.co/1rIOsDQJn6 Example extension for Go2 robot: https://t.co/a0B2lVT71U We can't wait to see what the robotics community builds with Holosoma!
github.com
Contribute to amazon-far/holosoma-extensions development by creating an account on GitHub.
2
4
41
Our goal is to lower the barrier to entry for humanoid research. By providing a broad infrastructure backbone, we hope to empower researchers to focus on novel algorithms and behaviors. This was all built by amazing people at Amazon FAR: @pabbeel, @jychen_1729, @rocky_duan,
1
1
19
We focused heavily on simplicity and modularity. Reward engineering is kept to a minimum, and we support manager-based environments (similar to Isaac Lab and mjlab) for ease of adaptability. In fact, Holosoma was built to be extended! We are releasing an example extension
1
0
10
A feature I find really helpful is video logging to wandb across all simulation backends. So much easier to sweep hyperparameters and browse through the results when you get to actually see the policy behavior on the screen. We also log ONNX files as we train, and our inference
1
2
24
We support both velocity tracking and whole-body tracking tasks. For whole-body tracking, we address retargeting with an OmniRetarget open-source implementation and re-implement simple BeyondMimic-style tracking. OmniRetarget: https://t.co/gDjuO1fk1Q BeyondMimic:
2
1
26
A major barrier in humanoid research is the lack of fully open, low-latency inference pipelines. Therefore, we release our inference stack, which allows you to run the exact same code across simulation backends and on real-world robots.
1
1
31
Simulation frameworks such as IsaacGym, IsaacLab, MuJoCo Playground, mjlab were all great inspiration to us! With Holosoma, we unify the simulation landscape: IsaacGym, IsaacSim, and MJWarp backends are all supported in a single training codebase. We also support multiple robots
1
0
41