
Robert Platt
@RobotPlatt
Followers
728
Following
1
Media
2
Statuses
74
Computer Science Professor at Northeastern. Robotic manipulation, learning, perception, planning, control, and other stuff. My group: @HelpingHandsLab
Joined April 2022
This paper was a finalist for the CoRL 2024 Outstanding Paper Award! Congrats everyone!
1
0
7
Not only is this an interesting approach, but it works great! Outperforms everything we benchmarked against.

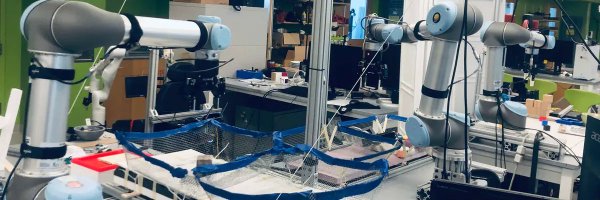
Check out our new grasping work, OrbitGrasp! It achieved a 98% grasping success rate by learning the SE(3)-equivariant grasp quality distribution using spherical harmonics. I’ll be at #CoRL2024 to present this paper.
0
0
8
Instead of inferring a desired object pose directly, this method "imagines" a reconstruction of the entire scene in the target pose. Surprisingly, we find that this improves sample efficiency, even though we are inferring more information.
Checkout our new work, Imagination Policy. We leverage a point cloud diffusion model to “imagine” a target scene, then use SVD to calculate rigid transformations that bring objects to the imagined scene as robot actions. More importantly, Imagination Policy is bi-equivariant!
0
1
8
I'm excited about this work. The equivariant model significantly reduces the number of demos needed to train good diffusion policies.
Introducing Equivariant Diffusion Policy, a novel sample efficient BC algorithm based on equivariant diffusion. Our method leverages the symmetry in policy denoising to boost learning — needing 5x less training data in sim and mastering complex tasks in real-world with <60 demos.
1
1
19
#ICLR24 We proposed FourTran, a very sample-efficient 3D manipulation pick-place model. 1. It can learn a nontrivial 3D policy with less than 10 demos. 2. It represents 3D action distribution in Fourier Space. Check it in the Poster Session 4 at 4:30 PM Vienna time (10:30 EDT)
3
4
18
Transporter network is great for robotic pick-place, but how to use it in 3D where rotating the kernel for entire SO(3) is infeasible? Our work performs cross correlation in Fourier space to facilitate reasoning over SO(3). Check out at #ICLR2024, @RobinSFWalters is presenting!

#ICLR24 We proposed FourTran, a very sample-efficient 3D manipulation pick-place model. 1. It can learn a nontrivial 3D policy with less than 10 demos. 2. It represents 3D action distribution in Fourier Space. Check it in the Poster Session 4 at 4:30 PM Vienna time (10:30 EDT)
0
2
11

Registration is now open for Boston Symmetry Day on April 7th! We have an exciting lineup of speakers (@mario1geiger, @tesssmidt S Gortler, E Grigsby, @RobotPlatt, @_onionesque) + more to come. Sign up here:
docs.google.com
Location: Northeastern University, Shillman Hall Time: Friday, April 7, 2023, 9 AM - 5 PM. There will be talks and a poster session, and we will provide lunch, a light breakfast, and coffee. More...
0
7
15
Hello world! The Boston Symmetry Group (pun intended) organizes events to foster community amongst Boston-area researchers and practitioners working on symmetry + machine learning. Organizers: @StefanieJegelka @HLawrenceCS @dereklim_lzh @park_jungy @RobinSFWalters
1
12
105

Congrats to my PhD student Sammie Katt for passing his defense titled "Bayesian Partial Observable Reinforcement Learning." Very cool work, Sammie! (with @faoliehoek, @RobotPlatt, and Lawson Wong).
0
5
47
Interested in partial observability? Come to my online poster session at @CoRL2022 (online session 2, Sunday, Dec 18, 7:30-8.00 AM, Auckland time, i.e., Saturday, Dec 17, 1:30 - 2:00 PM, EST time) w/ @RobotPlatt @cjdamato @DianWang1007 @AndreaBaisero @LLPR_NEU @HelpingHandsLab.

Glad to share our #CoRL22 paper https://t.co/tx3WSnpkS9 about using MDP solutions to efficiently learn POMDPs during offline training. We proposed a SAC-like agent that balances between acting like an MDP expert and for environment rewards.
0
5
12
Excited to share our new SOTA grasp method in the Sim-to-Real Robot Learning Workshop at #CoRL2022. I will present the poster tomorrow 13:30-14 and 14:30-15:15 at Eng 405-460. Our work proposes a novel grasp representation as the graph edge and an SE(3)-equivariant model. 1/
2
6
26

Very excited to share our work in the #CoRL2022 Workshop on Sim-to-Real Robot Learning! Our work leverages a novel simulation-based 3D data augmentation method and equivariant networks, helping achieve high data efficiency in imitation learning for robotic manipulation. 1/n
1
8
31
This work is led by @saulbadman12 @DianWang1007, with @GuanangS, @_davidklee, @XupengZ, @RobinSFWalters, @RobotPlatt, @HelpingHandsLab. The full version paper: https://t.co/D4YWXBcAQO. Full video: https://t.co/mPAtsgiR1N.
1
1
2
I'll be presenting our #NeurIPS poster tomorrow on Wed 11-1am, poster session 3. Please come by and check it out!

How do you robustly imitate expert demonstrations, without access to the environment? We present "Robust Imitation of a Few Demonstrations with a Backwards Model", to appear at #NeurIPS2022. Paper: https://t.co/gsynnlU03m Code: https://t.co/IzRpVCXWje (1/4)
0
3
11
We have 2 papers in the main conference #NeurIPS2022. Poster: Wed 5-7 Shield Decentralization for Safe Multi-Agent Reinforcement Learning https://t.co/jes6SYY365 Poster: Thurs 5-7 Asynchronous Actor-Critic for Multi-Agent Reinforcement Learning: https://t.co/w9YfUGk1MK
1
6
40
Looking for an easy-to-read review paper on Grasp Learning? I just wrote one for Annual Reviews that I'm excited about. Check it out: https://t.co/HENolMHX3B
3
13
72
I'm looking for PhD students for Fall 2023 to work at the intersection of Robotic Manipulation, Imitation Learning, and RL. I'm particularly interested in applying novel neural models like geometric DL. Apply by 12/15. @KhouryCollege @HelpingHandsLab
6
43
192
We tested on 6 robot domains and transferred one learned policy to real hardware. Project website: https://t.co/BvcNcDmaPp. Joint work w/ Andrea Baisero @DianWang1007 @cjdamato
@RobotPlatt at @LLPR_NEU @HelpingHandsLab

sites.google.com
Abstract Reinforcement learning in partially observable domains is challenging due to the lack of observable state information. Thankfully, learning offline in a simulator with such state information...
1
2
0
I am looking for a PhD student to start in Fall 2023 at @KhouryCollege focusing on the direction of 3D vision. Applicants from underrepresented groups are particularly welcome, where the college provides two-year fellowship support (domestic students only). Deadline is Dec 15.
5
33
98