

Carter Sifferman
@CartSiff
Followers
198
Following
4K
Media
32
Statuses
305
PhD Student @WisconsinCS | 3D Vision with Miniature ToF Sensors, Robot Sensing, Computational Imaging https://t.co/erkB2u6Z3v
Madison, WI
Joined February 2011
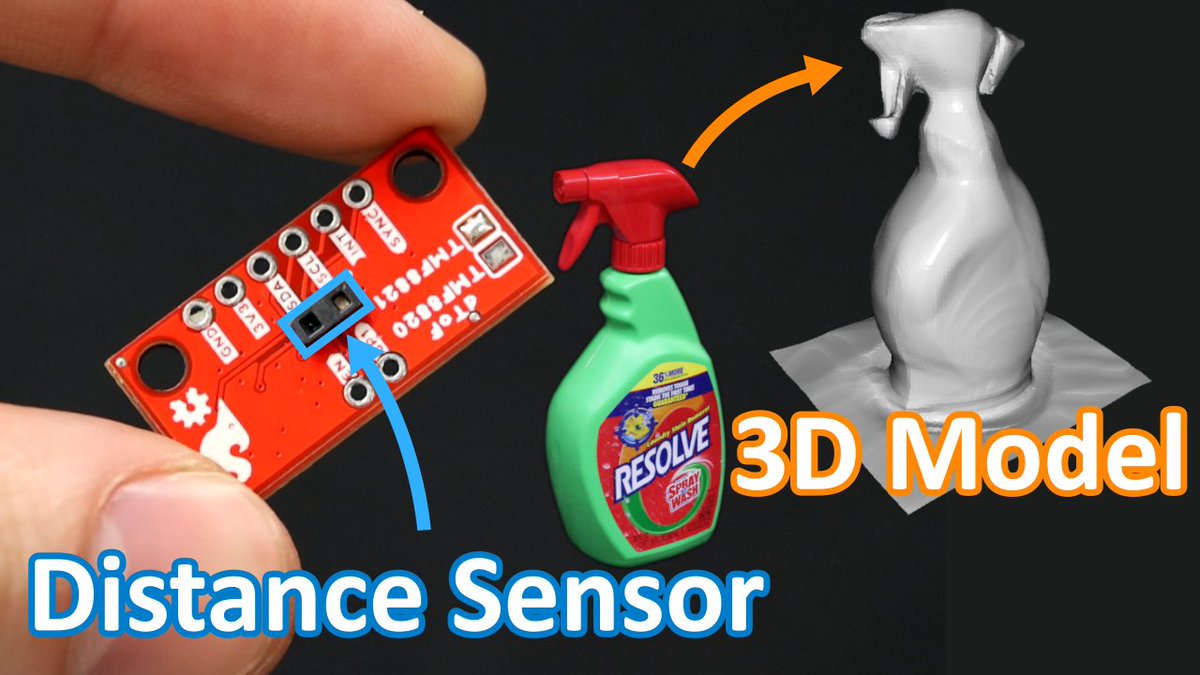
Is it possible to reconstruct 3D geometry from measurements of a miniature time-of-flight proximity sensor? Yes! I'm excited to share our CVPR 2024 paper, "Towards 3D Vision with Low-Cost Single-Photon Cameras". 🧵thread below
1
23
152
RT @ICCP_conference: Announcing the first #ICCP2025 Summer School at @UofT, July 19–20, 2025! Open to undergrad and grad students worldwide….
0
8
0

Generate videos in just a few seconds. Try Grok Imagine, free for a limited time.
353
642
2K
RT @luo_weihan: 📣 Excited to share a project I’ve been working on:.“Transientangelo: Few-Viewpoint Surface Reconstruction Using Single-Phot….
0
14
0
Thanks to my co-author William Sun, and my advisors Mike Gleicher and Mohit Gupta (none of whom are on Twitter!).
0
0
0
Looking forward to extending this work. There's a lot of potential for improvement when we design a sensing system starting from time-of-flight histograms rather than distance estimates.
1
0
0
Lastly, we build a demo application in which we attach a sensor to a mobile robot and use it to avoid obstacles and cliffs.

1
0
0
But there is still work to be done! Our method doesn't generalize well to new surfaces, and doesn't take advantage of temporal queues.
1
0
0
We find that our method, which uses raw time-of-flight histograms, works much better than using distance estimates alone.

1
0
0
We handle this variance by gathering a dataset of surfaces with many photometric properties, and modeling the distribution of expected raw time-of-flight measurements with a Gaussian mixture model.

1
0
0
The main challenge in detecting small deviations is not the signal-to-noise ratio, but dealing with variance in the signal from varying photometric properties of the planar surface.
1
0
0
First, we point out that an ambiguity between photometrics and geometry inherent to these sensors means that the problem is impossible to solve in many cases without making assumptions about the surface properties (see illustration in figure).

1
0
0
We consider the problem of detecting whether a surface is planar using a single measurement from a miniature time-of-flight distance sensor with only a single pixel.

1
0
0
Excited to share our new paper, "Using a Distance Sensor to Detect Deviations in a Planar Surface", which was just accepted to RA-L (and will be presented at ICRA '25). 🌐Project page: 📜arXiv: 🧵thread below 🧵.
1
1
2
RT @tklinghoffer: 🚨 🚨 🚨 The Neural Fields Beyond Conventional Cameras workshop at #ECCV2024 is accepting papers and extended abstracts for….
0
10
0
Stop by demo booth #4 in the exhibition hall today to see my labmates’ (@varun19299 and Sacha Jungerman) single photon imaging demo!


0
0
2
Come see us at the afternoon poster session at 5PM today, board 45.
0
0
0
We’ll be presenting this work at poster board 318 from 11:15-12:30 today as part of the Computational Cameras and Displays workshop. Come check it out!. We will also be at the poster session tomorrow (Wednesday) afternoon as part of the main conference.
1
0
2
Our method outperforms baselines (rightmost 3 columns) by a significant margin on a wide range of scenes
1
1
10
To capture a bunch (100+) of posed sensor measurements per scene, we attach the sensor to a robot arm

1
1
8