
Sergio Casas
@sergioksas
Followers
321
Following
207
Media
9
Statuses
70
Foundation models for self-driving @Waymo. Previously @Waabi_ai and @Uber ATG. 🚗 🚚 🤖 ✨
Miami, Florida
Joined July 2015
Visually, we see a much more realistic coverage of the possible futures when scaling up the model size / training flops
1
0
2
Not only can we scale during training, but also at inference! By sampling more rollouts and clustering them, we can improve the performance of the model significantly. After a cross-over point of inference compute, it is best to switch to a larger model.
1
0
1
Most importantly (!) we show that similar to the scaling law fits for both loss and open loop metrics, closed loop performance also follows a similar scaling trend, with the number of failures decreasing as a power law when scaling pretraining compute.
1
0
1
Our study demonstrates that the empirical power-law scaling trend for language models, also applies to the task of motion forecasting in the autonomous vehicles domain. Besides the model being trained with teacher forcing, we observe similar scaling trends in open-loop rollouts.
1
0
1
We find the Chinchilla compute-optimal models by training 84 MotionLMs that vary in number of params, network width/depth, and training steps
1
0
1
We study the scaling of motion forecasting and planning using an encoder-decoder autoregressive model with tokenized motion actions.
1
0
1
Check out the scaling laws for motion forecasting and planning that my team has just released 🚀 Paper:

Our research is driving the #AutonomousVehicle industry forward. 🚘➡️ We’ve found that #AI scaling laws hold true in AV software and real-world performance can be improved by increasing training data and compute. Take a deeper dive: https://t.co/ljFKVnTqSh
1
0
8
Headed to @CVPR? Join our full day tutorial titled, “All You Need to Know About Self-Driving,” on Tues, June 18 at 9am in room Summit 445. We’ll also present our paper, UnO: Unsupervised Occupancy Fields for Perception and Forecasting, on Thurs, June 20! https://t.co/zmbZXEe5l1

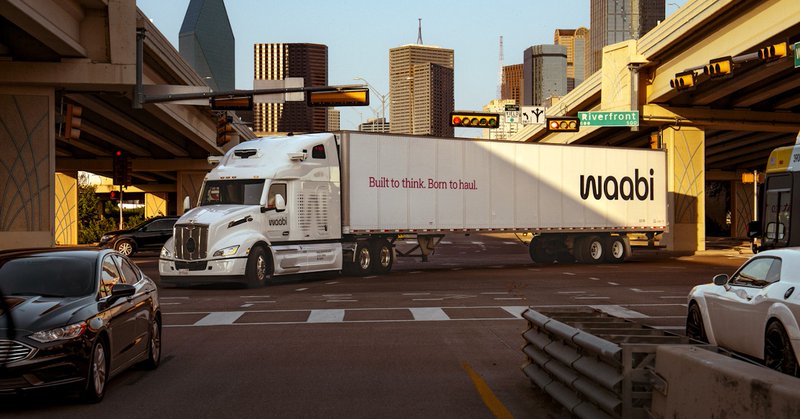
waabi.ai
Waabi is pioneering Physical AI, starting with autonomous trucks. We developed a next-generation approach leveraging an end-to-end interpretable and verifiable AI model that’s powered by the indust...
0
3
12
Introducing our Occupancy Foundation Model, UnO! 🪄🧙♂️ Simple, fast, and it works like a charm to perceive and forecast any object out there! Check it out

How can we make self-driving systems robust to out of distribution scenarios? We investigate this in our #CVPR2024 paper "UnO: Unsupervised Occupancy Fields for Perception and Forecasting". Website: https://t.co/95tT3iMy1a ArXiv: https://t.co/p6roKRRo0G
0
0
13

Excited to share a new foundation model for self-driving, Copilot4D. Paper: "Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion", accepted to #ICLR2024 Arxiv: https://t.co/CRkK2FSMXG Blog: https://t.co/BpjYDmVZJg Video:
waabi.ai
Waabi is pioneering Physical AI, starting with autonomous trucks. We developed a next-generation approach leveraging an end-to-end interpretable and verifiable AI model that’s powered by the indust...

Today, we are excited to unveil our latest research, Copilot4D: the first foundation model that explicitly reasons in both 3D space and time. Read more about this breakthrough in AI for the physical world in our blog: https://t.co/WWY4NvEq6t
2
5
27
Today, we are excited to unveil our latest research, Copilot4D: the first foundation model that explicitly reasons in both 3D space and time. Read more about this breakthrough in AI for the physical world in our blog: https://t.co/WWY4NvEq6t
0
10
28
How can we generate high-quality auto-labels for self-driving LiDAR data without a human in the loop? 🚗 Check our @corl_conf paper LabelFormer, a simple, efficient, effective transformer-based model to refine object trajectories for auto-labelling. More: https://t.co/U9e4KlTGZR
3
25
46
Check out this thread from my colleague @BenAgro4 to learn more about our exciting work on implicit occupancy flow fields for self-driving! Fantastic work with @BenAgro4 @QuinlanSykora and @RaquelUrtasun that will appear as a highlight in #CVPR2023
https://t.co/c3KLRlhMs4
waabi.ai
Waabi is pioneering Physical AI, starting with autonomous trucks. We developed a next-generation approach leveraging an end-to-end interpretable and verifiable AI model that’s powered by the indust...
How can we design more expressive perception and motion-forecasting systems for self-driving? In our paper "ImplicitO: Implicit Occupancy Flow Fields for Perception and Prediction in Self-Driving" #CVPR2023, we introduce ImplicitO - https://t.co/CU0b88muwl
0
1
5
How can we design more expressive perception and motion-forecasting systems for self-driving? In our paper "ImplicitO: Implicit Occupancy Flow Fields for Perception and Prediction in Self-Driving" #CVPR2023, we introduce ImplicitO - https://t.co/CU0b88muwl
2
5
12
How can we train an unsupervised object detector from raw sequences of point clouds in self-driving scenes, without any human labels? In our paper “Towards Unsupervised Object Detection from LiDAR Point Clouds” #CVPR2023 , we introduce OYSTER - https://t.co/NWPpJd7IAC
2
9
46
We now have a website for the amazing research our team has been doing at @Waabi_ai! https://t.co/HCI4ex60WF

waabi.ai
Waabi is pioneering Physical AI, starting with autonomous trucks. We developed a next-generation approach leveraging an end-to-end interpretable and verifiable AI model that’s powered by the indust...
Innovation and purposeful research are core to our company. We’re excited to unveil Waabi’s Research Hub, a repository for us to share our research and breakthroughs. Learn more here:
0
1
6
0
0
2
Had a great time presenting our work at ICRA today! If you are interested in knowing more about GoRela, happy to see you at our poster session this afternoon (15:00 - 16:40, Pod 36). Arxiv link: https://t.co/TbUfniMz7Y
We’re excited to join the International Conference on Robotics and Automation (ICRA) this week! Our research team will be presenting two papers, including a paper nominated for an Outstanding Best Paper award. Check out the finalists for the award here:
3
5
13

Self-driving truck startup Waabi brings on Volvo VC as strategic investor https://t.co/Yn4PbnwSmV by @rebeccabellan
1
12
21