

Ian Abraham
@ianabraha
Followers
581
Following
1K
Media
15
Statuses
138
Asst. Prof @YaleSEAS ME/CS | Prev. 🤖Robotics @CMU_Robotics @NorthwesternU | Lab https://t.co/M9Zjq8QO1d https://t.co/XDhClABNOR
Pittsburgh, PA
Joined January 2019
My lab will be heading over to #RSS2025 ! If you are interested in contact-aware information theory for robotics, reach out to @Hrishikesh913 . @haoxiang_you Yilang Liu, and Christian Hughes will be around to talk about their work on efficient robot learning and control!.
Robots 🤖 make and break contact all the time. So what quantifies usefulness of contacts for a robot’s understanding of its environment? Check out our latest #RSS2025 paper on contact aware fisher information maximization!! 🧵below—-.
0
3
14
Think of the contact aware fisher information as a sensitivity measure that we can directly optimize wrt control-contact decisions to help robots learn about their environment more effectively!.
1
0
0
Taking a Taylor expansion over parameters yields the contact aware Fisher information matrix that quantifies how useful contact mechanics are to understanding physical constants!!.
1
0
0
We posed a contact aware max likelihood problem where the goal was to correlate robot control, sensing to physical (contact) constraints.
1
0
0
Robots 🤖 make and break contact all the time. So what quantifies usefulness of contacts for a robot’s understanding of its environment? Check out our latest #RSS2025 paper on contact aware fisher information maximization!! 🧵below—-.

How much information is in contact interactions and how can we optimize for them to improve robot learning?. Check out our latest work on Behavior Synthesis via Contact-Aware Fisher Information Maximization led by myself and @ianabraha at #RSS2025!. Paper:
1
1
3
RT @TCOptRob: [Announcement] All of our seminar series videos are now available on YouTube. Happy watching!.
0
3
0
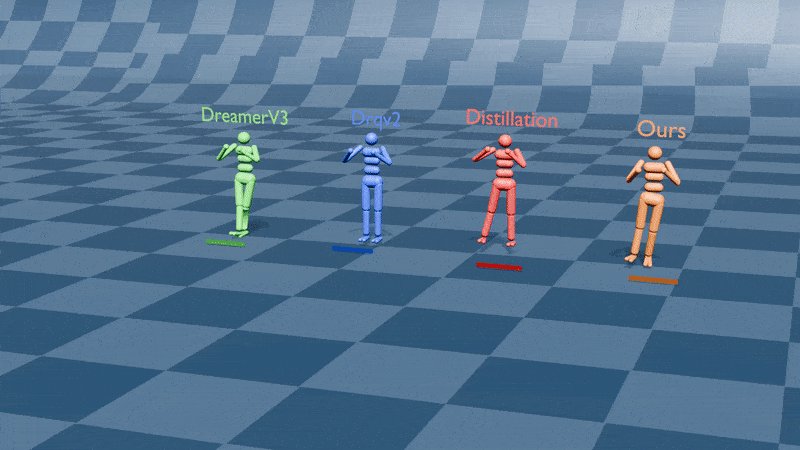
Doing some analysis, we find observation-only gradient information actually made policy updates more challenging. Removing this term led to interesting connections with student-teacher policy distillation and huge computational gains! check out @haoxiang_you 's post for more info.
0
0
0
We took a good hard look at the analytical policy gradient going from vision to state to dynamics to policy and realize it is separable!! -- one part only has state/dynamics info the remaining is observation-only.
1
0
0
The idea was quite simple, but cleaver --- we are very good/fast at trajectory opt with diff sims, why can't the same be true for visual policy learning?.
2
0
0
🚀🚀🚀 Check out this work out of my lab on accelerating visual-policy learning by exploiting computational structures in diff sims!! 🧵 below on why its exciting!!.

🚀 Excited to introduce — a computationally efficient approach for learning visual policies!.⚡ Trains in minutes on a laptop and consistently beats existing baselines in reward.



1
0
4
Check out the latest work by my students @haoxiang_you and Yilang Liu! ~~~Thread coming soon~~~.
🚀 Excited to introduce — a computationally efficient approach for learning visual policies!.⚡ Trains in minutes on a laptop and consistently beats existing baselines in reward.
1
0
4
RT @haoxiang_you: 🚀 Excited to introduce — a computationally efficient approach for learning visual policies!.⚡ Tra….
0
5
0
Elena Wittemyer will present Multi-Agent Ergodic Exploration under Smoke-Based, Time-Varying Sensor Visibility Constraints, WeAT10.TLDR; Ergodic search with a smoke-based fluid solver to inform search of visibility constraints ( search in forest fires).
0
0
1
Christian Hughes will present Ergodic Trajectory Optimization on Generalized Domains Using Maximum Mean Discrepancy, ThBT19 .TLDR; A novel metric for ergodic trajectory optimization that only requires domain samples useful for coverage guarantees for SLAM.
1
0
1
Dayi Dong will present Ergodic Exploration over Meshable Surfaces, ThBT19 TLDR; Demonstrates ergodic trajectory optimization over mesh domains via the Laplace-Beltrami operator.
1
0
1
My lab and I will be @ICRA in Atlanta showcasing three papers on ergodic search! .more details below in comments!
1
1
2
RT @h_ravichandar: 📢ICRA workshop on structured robot learning with awesome speakers and an exciting program! . We will discuss current sol….
0
5
0