

村山龍太郎 | 生成AI x ロボット
@03nova
Followers
1K
Following
16K
Media
540
Statuses
2K
生成AI x ロボット、ヒューマノイド、ロボット基盤モデルについて紹介、解説します / Preferred Robotics プロダクトマネージャー / ex- IBM, SoftBank Robotics, LINE, GROOVE X, Amazon / 10年以上ロボットに関わる仕事をしています
tokyo
Joined August 2009
K-scale labs(9000ドルのオープンソースヒューマノイド開発US企業)のUnitreeについての考察. 1. Unitreeの優位性と戦略.•Unitreeは価格競争力があり、かつ利益を上げられている(赤字販売ではない)。.•中国国内の巨大なサプライチェーンと効率的な製造能力により、コストを抑えつつ品質を向上。.

About a dozen people sent me the Unitree announcement today. Makes sense, since I guess since K-Scale is the only American humanoid robot company with a product that you can actually buy. If you are American and you care about the future of robotics in this country, you should.
0
4
18
Unitreeから6,000ドル(88万円)のヒューマノイド R1が登場.26自由度で、俊敏性のある動き。逆立ちもできる.ついにヒューマノイドが100万円を切る時代に

🚀🔥 The Unitree R1 just landed — and it's an absolute monster. Built for locomotion supremacy, it packs 26 DOFs into just 25kg of pure speed and agility — all for ~$6K, nearly 10× cheaper than the G1 🤯. Looks? Straight out of a sci-fi film, just like a space explorer 🧑🚀. We’re
1
100
309
RT @reborn_agi: 🚀🔥 The Unitree R1 just landed — and it's an absolute monster. Built for locomotion supremacy, it packs 26 DOFs into just 25….
0
85
0
ピッキング・アシスト・ロボット「ラピュタPA-AMR」65台が関東にある花王の物流拠点に採用が決まったと発表した。納入は今年の冬を予定する。.

[トピックス].花王がピッキングアシストAMRの重量検品タイプを採用/ラピュタロボティクス.#ロボット #産業用ロボット.ラピュタロボティクスは7月17日、同社のピッキング・アシスト・ロボット「ラピュタPA-AMR」65台が関東にある花王の物流拠点に採用が決まったと発表し…

0
0
2
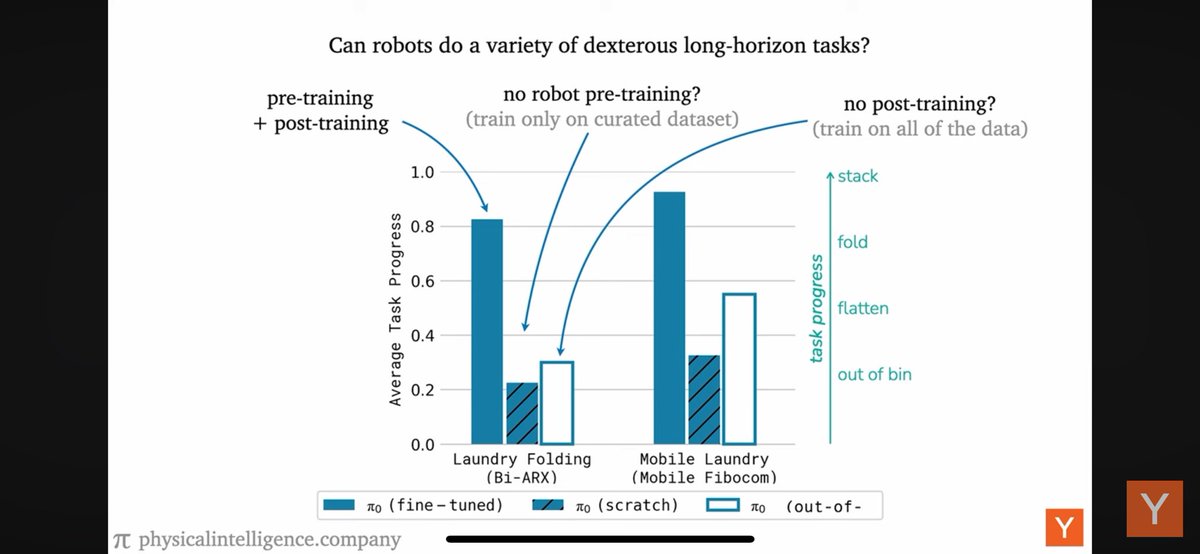
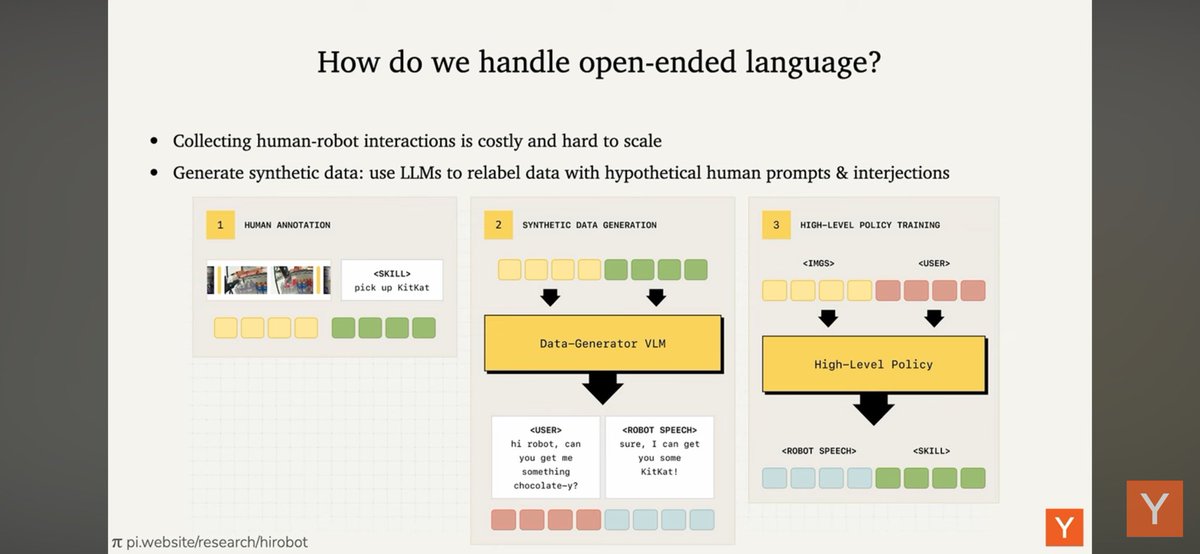
Chelsea Finnによる怒涛のVLA(ロボット基盤モデル)の進化まとめ(1年分) at Y combinator. 🔸既存のロボットとの違い

1
0
5
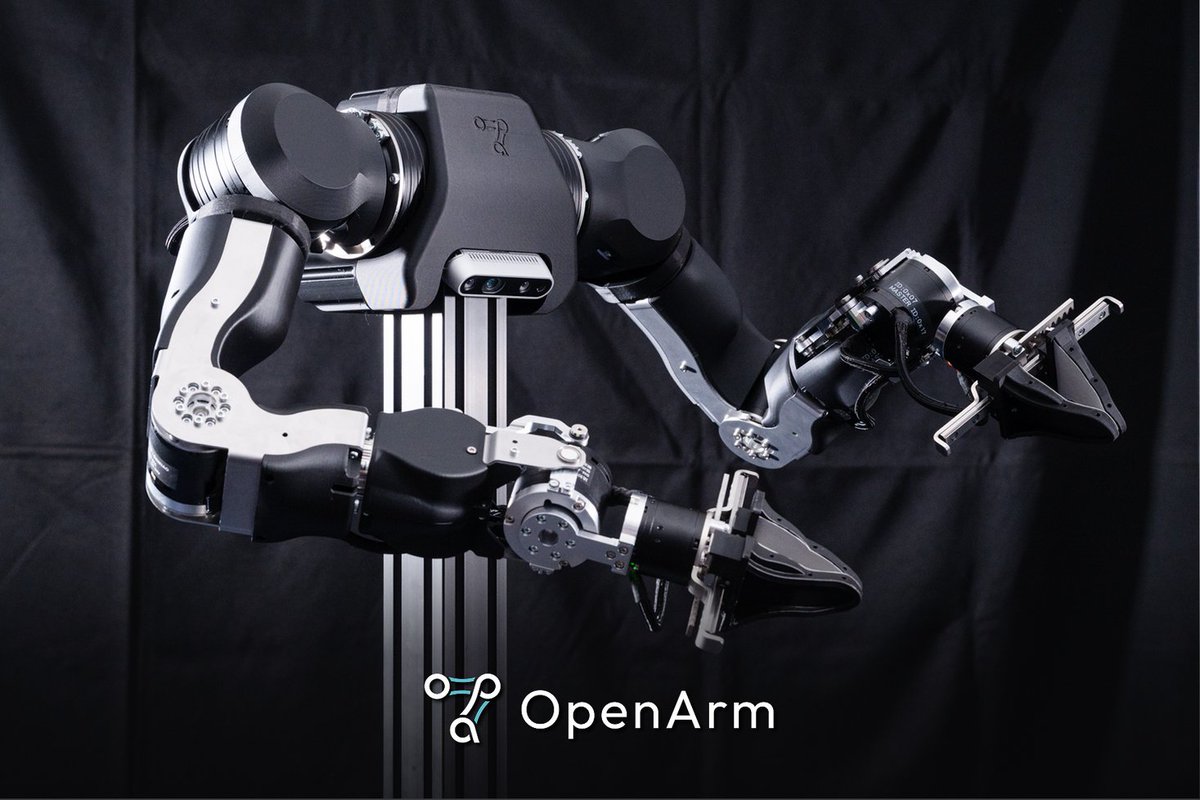
『OpenArm』は、人間と共存できる環境での安全性と実用性を両立することを目指して開発されたロボットアーム開発プロジェクトです。機械的コンプライアンスを重視したQDD(クワジ・ダイレクトドライブ)モータを採用し、ハードウェア設計からソフトウェア制御までのすべてをオープンソース化しています.

2
2
47
ROBOTISは独自開発したセミヒューマノイドロボット「AIウォーカー」を2025年中にOpenAIへ供給する。数量は公開されていないが、同社はすでに2025年下半期に国内市場で100台の販売を目標に掲げている。.

3000億円. 韓国、ヒューマノイド戦線に本格参戦…アメリカ・中国に挑む技術力(KOREA WAVE).#Yahooニュース.
0
6
30
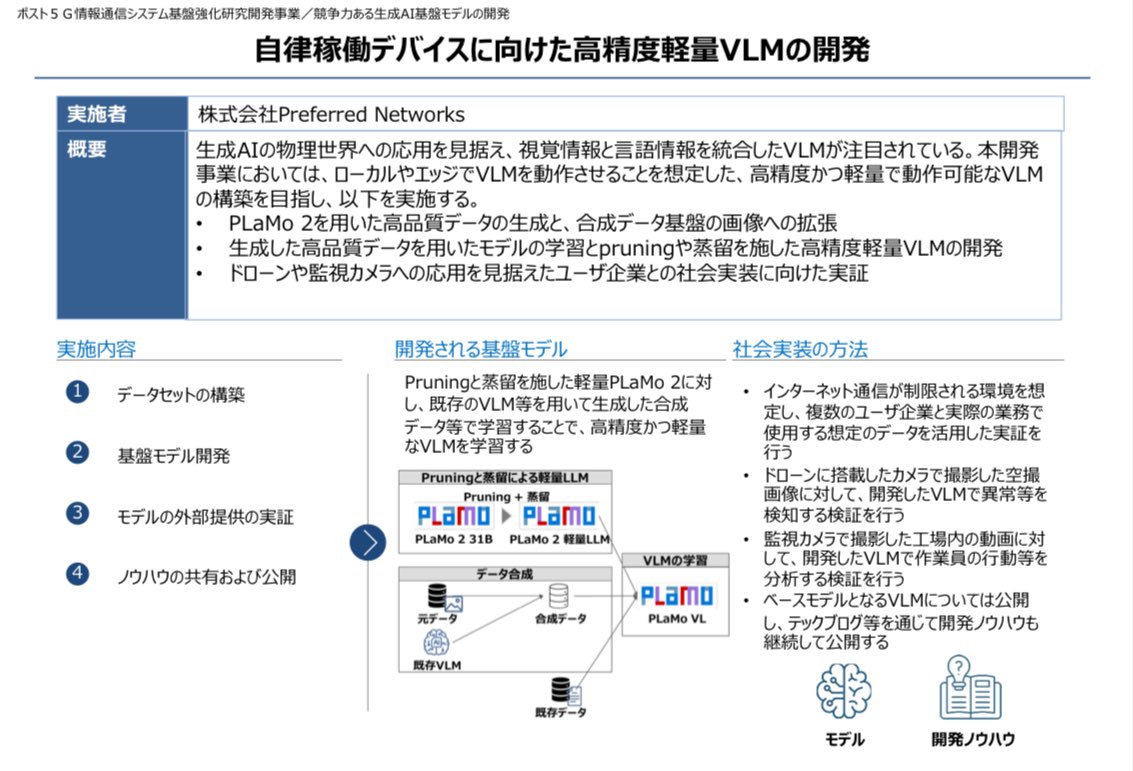
PFN高橋さんのチームでGENIAC採択!.しかも自律稼働デバイス向け!.

GENIACに採択されて、PFNのVision Language Model (VLM)チームで「自律稼働デバイスに向けた高精度軽量VLMの開発」を進めていきます!.
1
0
9
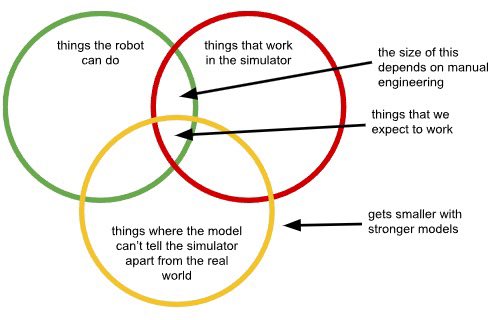
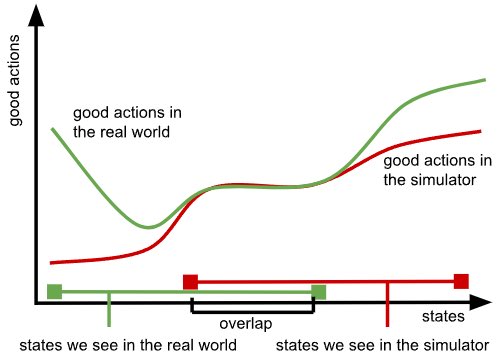
==コメント==.・シミュレーションなど、代替データでは汎用的なロボット基盤モデルは実現できないと言い切っている.・最近のシミュレーター、first person viewからの学習、グリッパーアタッチメントで動作指示、などのさまざまな手法が提案されていることに対してのアンサー.
0
0
1
Sergey Levine :ロボット基盤モデルが実世界の複雑さを真に学習するためには、現実世界での相互作用から得られる本物のデータ(=実ロボットの動作データ)が不可欠. 🔸シミュレーションデータで学習をさせると、モデルがシミュレーターと現実世界を区別できない領域(=タスク)が増える
1
5
17
>次世代AIリサイクルロボットの共同研究に関連した事業について、令和7年度から9年度の3年間で、新たに約10億円の官公庁支援を獲得する見込み. >弊社はフィジカルAI(Physical AI)の社会実装を目指し、VLA(Vision-Language-Action)技術を核としたロボット開発に取り組んでいます。.

RP.イーアイアイ、AIリサイクルロボット事業で新たに約10億円の官公庁支援を獲得.次世代型ロボットの社会実装・量産化および先端技術研究を本格加速.株式会社イーアイアイ.「弊社はフィジカルAI(Physical.
0
0
2
ロボット基盤モデルを開発しているSkiledAIの社内が初めて公開.自作のヒューマノイドが動いている.ソフトバンクらから500億円の投資を受けていて、汎用性の高いモデル開発を進めている.

At a robotics lab in Pittsburgh, engineers are building adaptable, AI-powered robots that could one day work where it's too dangerous for humans. The research drew a visit from President Trump, who touted U.S. dominance in AI as companies announced $90 billion in new investments.
0
2
8

どこでもロボット動作データを収集できるキットUMIに触覚センサーをつけた新バージョンをリリース. ・0.2mm程度のセンサーで、キット全部で1kgを切る軽さ.・2700以上のデータで学習。鉛筆削りに鉛筆を入れる、ピペットで液体を注ぐなどの力加減が重要な細かなタスクを実現
Tactile interaction in the wild can unlock fine-grained manipulation! 🌿🤖✋. We built a portable handheld tactile gripper that enables large-scale visuo-tactile data collection in real-world settings. By pretraining on this data, we bridge vision and touch—allowing robots to:
0
1
5