
Dongho Kang
@eastskykang
Followers
661
Following
184
Media
39
Statuses
331
Research scientist at @rai_inst and fresh PhD in computer science from @crl_ethz, @eth_en. Legged robotics, character animation, optimal control and RL.
Zurich, Switzerland
Joined December 2017
📄 Happy to share our recent RA-L paper "Whole-body Inverse Dynamics MPC for Legged Loco-Manipulation"! We introduces a whole-body MPC framework that unifies motion and force planning within a single control layer, which enables physically consistent, emergent behaviors that
1
13
60

See Spot perform dynamic whole-body manipulation. Using a combination of reinforcement learning (RL) and sampling-based control, the robot is able to autonomously drag, roll, and stack tires weighing 15 kg (33 lb), well above its maximum arm lift capacity. Learn more about
21
154
771

Spot is playing Ping Pong! Spin is a crucial part of the game, but few robots can handle it. We show receiving and generating significant spin using MPC. Collaboration with David Nguyen and Zulfiqar Zaidi! Video: https://t.co/S3VKSHEfpW. Paper: https://t.co/r0yRW1JK3H.
1
17
107
Again, a huge congratulations to @yarden_as for his excellent leadership on this project. I'm grateful for the opportunity to have contributed alongside such a brilliant team. Witnessing the impact of theoretical advances on practical robotics was a truly rewarding experience.
0
0
0
"SPiDR" offers an elegant solution for training safe policies for sim-to-real transfer without needing any real-world data, making it versatile and easy to integrate with existing pipelines. You can learn more at the project website:
yardenas.github.io
Safe transfer of RL policies from sim to real.
1
0
0
I'm thrilled to share "SPiDR: A Simple Approach for Zero-Shot Safety in Sim-to-Real Transfer" will be presented by Yarden As at #NeurIPS2025! I'm proud to have been part of the team behind this amazing project.

Happy to share that I will present two of my recent works @ #NeurIPS2025. In this line of work we studied how to build RL agents that learn safely online (aka safe exploration).
1
0
4

We also release some LaTeX sty and bib files used in the handbook. If you are writing an ICRA paper on SLAM, these should be useful. Visit our GitHub repo for details: https://t.co/HWffjGuz7B
github.com
Release repo for our SLAM Handbook. Contribute to SLAM-Handbook-contributors/slam-handbook-public-release development by creating an account on GitHub.

We have completed the SLAM Handbook "From Localization and Mapping to Spatial Intelligence" and released it online: https://t.co/AnKa398nyw . The handbook will be published by Cambridge University Press. [1/n]
0
6
35

We're organizing a workshop at humanoids about RL and model based control. Please submit an extended abstract for the poster session!!

📢Call for Posters: Harmonising Practical Robustness and Theoretical Reliability in Legged Locomotion: Fusion of Reinforcement Learning and Model-based Control 🚨Deadline has been extended to 7th Sep.2025 (AoE) We welcome your submissions 🔗 https://t.co/YjkYtksgqN
#Humanoids2025
0
11
42
After an incredible journey completing my PhD, I’m starting my next chapter as a research scientist at @rai_inst. I am excited to join the amazing team and contribute to the mission of creating the next generations of intelligent robots.
1
0
38
@gabe_mrgl @kevin_zakka Excited to see you all at future conferences and continue to advance this field together.
0
0
1
A huge thank you also goes to the amazing roboticist friends I've met along the way. I'm so grateful to those who didn't hesitate to share their wisdom, even when we had just met. Thank you, @gabe_mrgl and @kevin_zakka for your kind help and advice!
2
0
2
I have successfully defended my dissertation "Animal Motion Imitation For Adaptive and Lifelike Control of Legged Robots" at ETH Zurich. A huge thanks to my supervisors, committee members, amazing collaborators, and peers at CRL @crl_ethz who made this possible!
5
2
80
Researchers from RAI Institute present Diffuse-CLoC, a new control policy that fuses kinematic motion diffusion models with physics-based control to produce motions that are both physically realistic and precisely controllable. This breakthrough moves us closer to developing
2
42
175

📢 Call for Papers! We are now inviting contributions to the Workshop on Sim-to-Real Transfer for Humanoid Robots, to be held at #Humanoids2025 @HumanoidsConf in Seoul, South Korea! 🎤 We already have a great lineup of invited speakers and panelists to discuss the current
2
9
49

Unitree Introducing | Unitree A2 Stellar Hunter 🤩 Total weight: ~37kg | Unloaded range: ~20km Lighter, Stronger and Faster. Engineered for Industrial Applications.
733
2K
12K
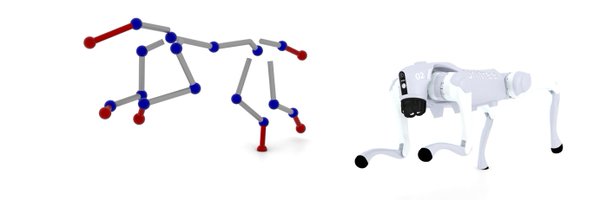
"Spatio-Temporal Motion Retargeting for Quadruped Robots" has been accepted to T-RO! We show how adapting motions in both "space and time" enables more reliable learning of dynamic motor skills from diverse media. Huge congrats to @TaerimYoon_ on the amazing work.

🚀Excited to share that our paper "Spatio-Temporal Motion Retargeting for Quadruped Robots" has been accepted to IEEE Transactions on Robotics (T-RO). Project page: https://t.co/wu5UHj5Owo Paper: https://t.co/k5jPXJtuvs
0
0
19
Unitree Introducing | Unitree R1 Intelligent Companion Price from $5900 Join us to develop/customize, ultra-lightweight at approximately 25kg, integrated with a Large Multimodal Model for voice and images, let's accelerate the advent of the agent era!🥰
790
2K
8K
Introducing "RAMBO", a new hybrid control framework that combines model-based control and RL for both "precise" and "robust" loco-manipulation. The paper has been accepted to IEEE Robotics and Automation Letters (RA-L). A huge congratulations to Jin Cheng @catachiii!

🐕 I'm happy to share my paper: RAMBO: RL-augmented Model-based Whole-body Control for Loco-manipulation has been accepted by IEEE Robotics and Automation Letters (RA-L) 🧶 Project website: https://t.co/SV901snEF2 Paper: https://t.co/BWsb8fIiYa
1
1
18
Last Friday, we participated in the annual ETH RobotX Innovation Day. The event began with an inspiring opening by Prof. Stelian Coros. We were proud to share our latest research with the broader ETH robotics community and industry partners.
0
3
11
🔥 Happening now @ETH_en, RobotX Innovation Day is attracting huge attention from the robotics community! 🎉 🤖 Here is a quick walk-around: @leggedrobotics @crl_ethz @cvg_ethz @ASL_ETHZ @srl_ethz @eth_dmavt @CSatETH @ETH_AI_Center @duatic_ag @FlexionRobotics @mimicrobotics …
2
20
109